
CMU 15-418/15-618 X Stanford CS149: Parallel Computer Architecture and Programming
封面来源:@toutenkou10105
15-418 Watch lecture video of 2016 spring and do assignments of 2018.
CS149 Watch lecture video of 2023 spring and do assignments of 2024.
[!TIP]
做 PA3 的时候,发现还是对照着做好一些,转向看 CS149 的 slides。 事实证明,有对应的,先看对应的;有新的,看新的。
Why Parallelism? Why Efficiency?
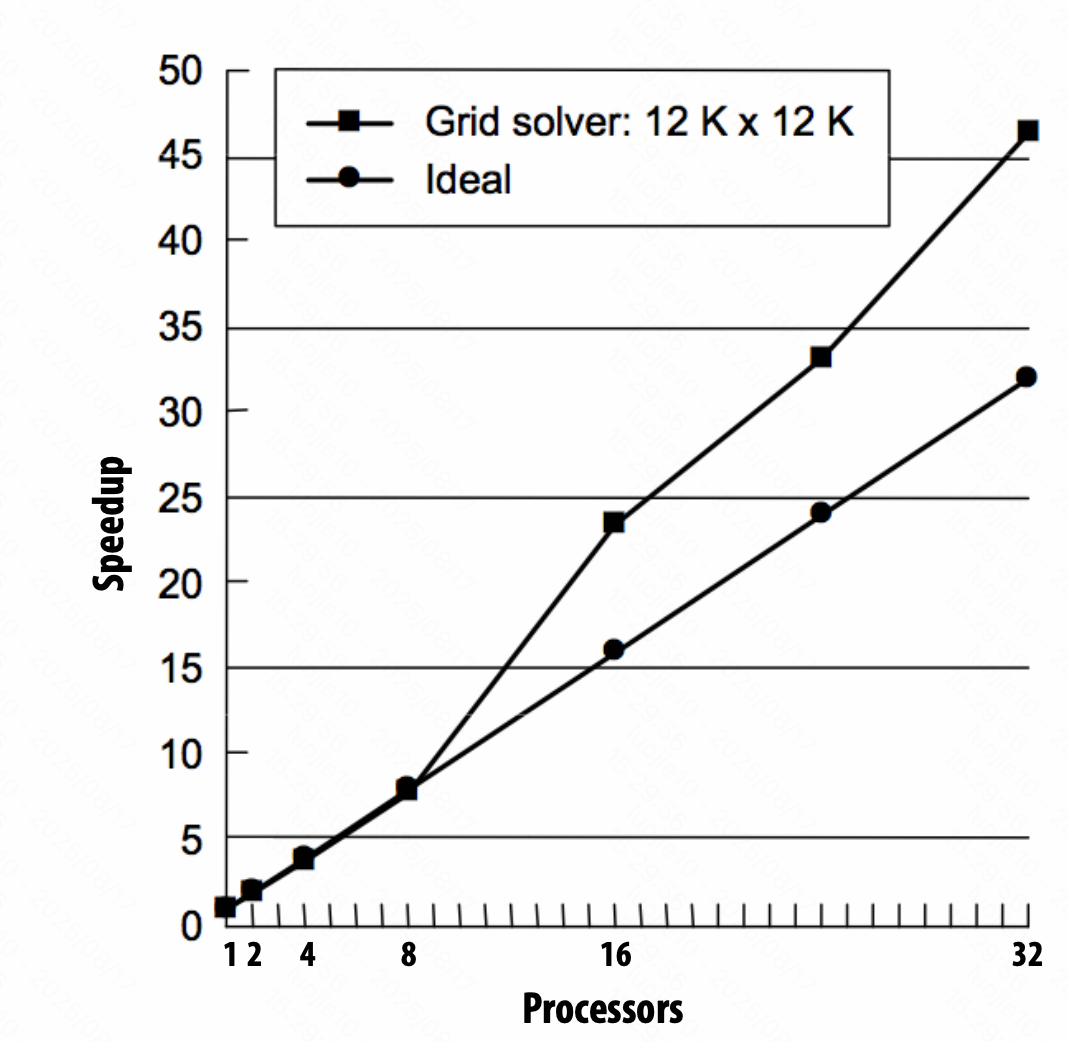
通信开销不能忽视,导致不能达到理想的加速比。
负载不平衡,负载少的等待负载多的。
Themes:
- 设计、编写并行算法,并行思维,
- 了解底层硬件特性
- efficiency 高效 ≠ 快,不同的应用场景看法不一样。
Insttuction Level Parallelism (ILP) 指令级并行
单核处理,需要按照程序计数器 PC 串行运行,而实际上,不是所有指令都有严格前后依赖关系,可以同时运行。
通常的程序,ILP不会超过4,同时,虽然晶体管数量能以摩尔定律增长(之前),时钟频率瓶颈,当晶体管中都有不小的电容,此时要提高频率就需要增大电压,高电压,高发热,高能耗,就提不上去了。
Power wall
$\text{Dynamic power} \propto \text{capacitive} \cross \text{voltage}^2 \cross \text{frequency} $
单指令流到达性能提升瓶颈,发热、能耗,ILP通常不能超过 4 倍;
调度、通信开销、负载均衡,使得不能达到最高的加速比
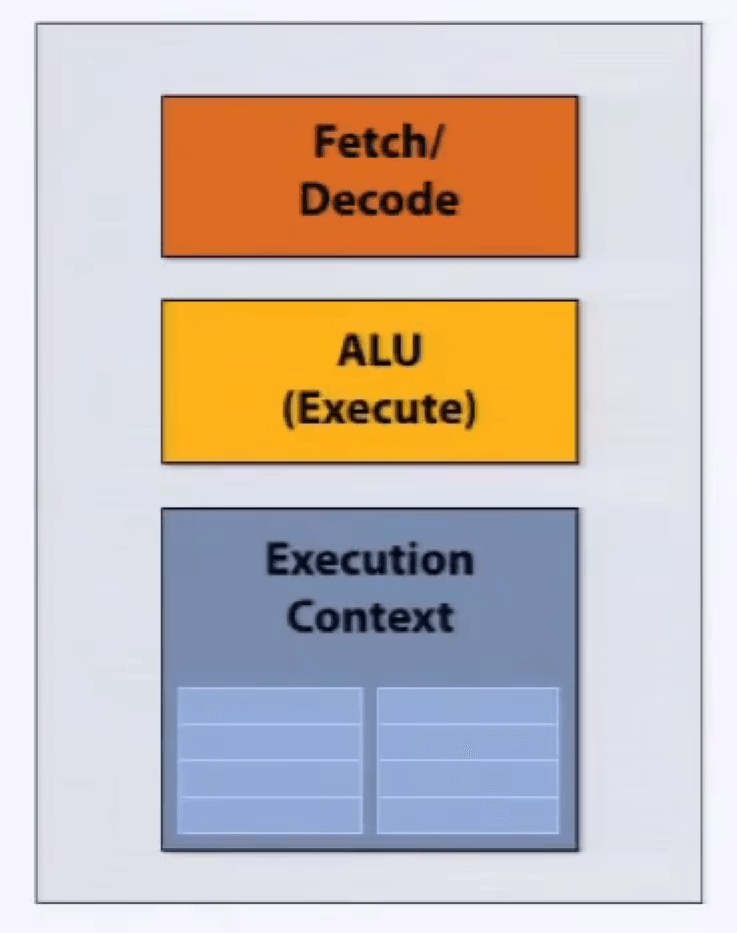
A Model Multi-Core Processor
Part 1: parallel execution
处理器,抽象组件:取指令、译码,执行指令,执行上下文。
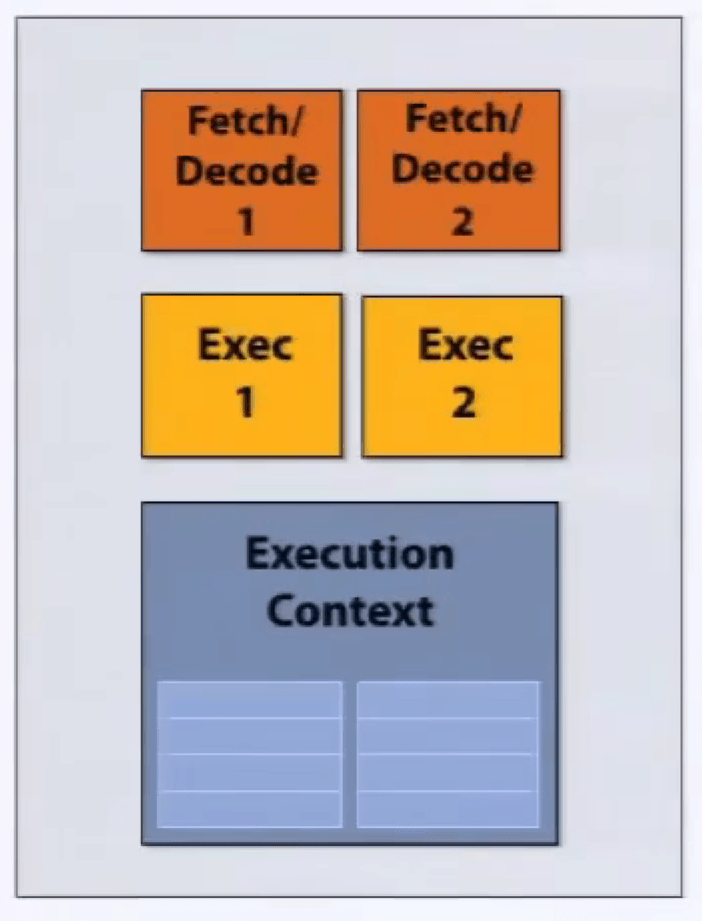
superscaler execution 超标量执行,在指令流中,两条指令是独立的,处理器发现并并行处理。
并不是真正意义上的并行,可能采用 pipeline 流水线技术。
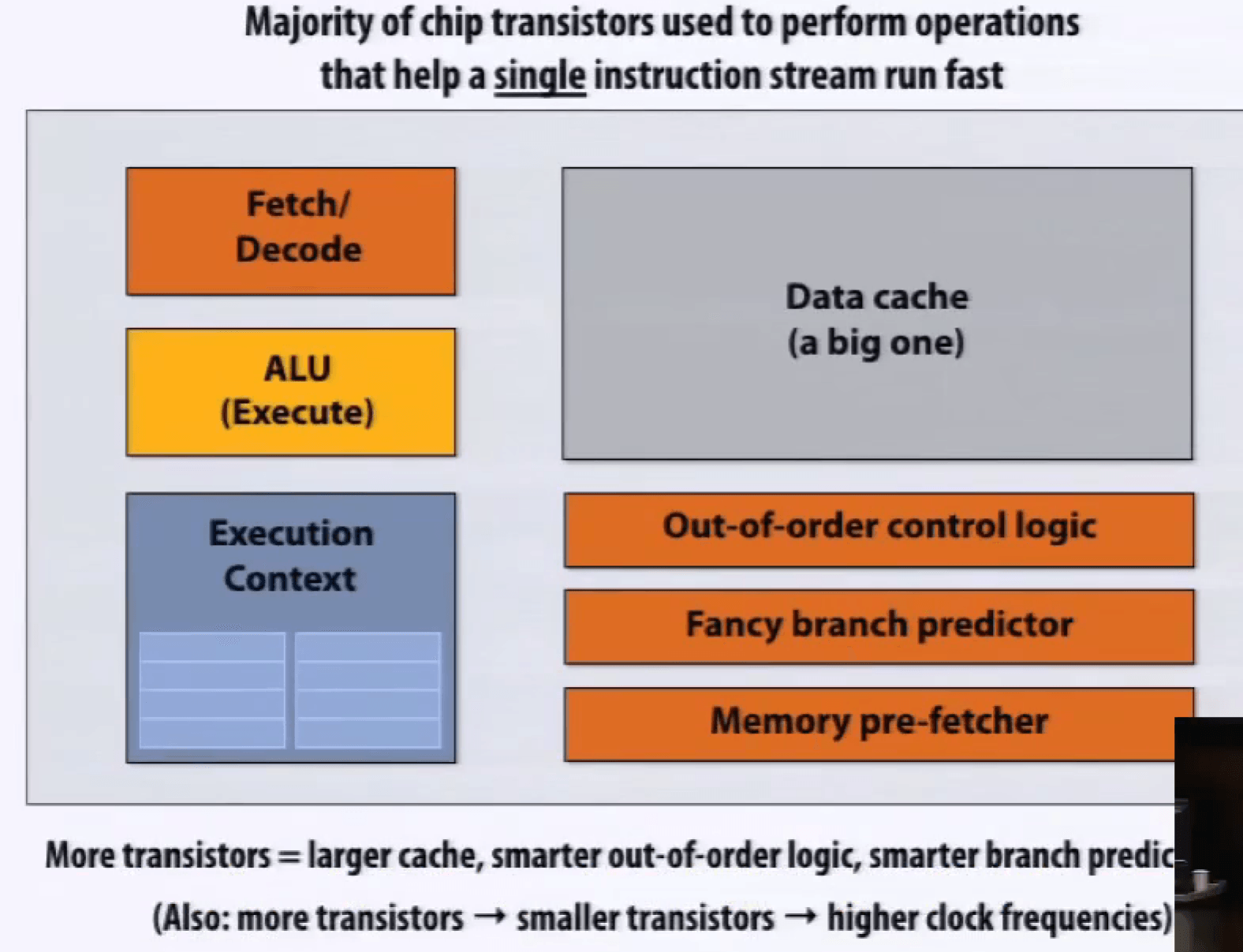
快速单指令流的技术:内存预取、分支预测、乱序执行 Out-of-Order Execution, OoOE。
乱序执行,Instruction Window 指令窗口,译码后先放入指令窗口,指令准备所需数据就绪就执行;有序提交,Re-order Buffer 重排序缓冲区缓存乱序执行的结果,确保正确顺序更新。
这些技术虽然能加速,但也占据了处理器的很大空间,需要不少成本。
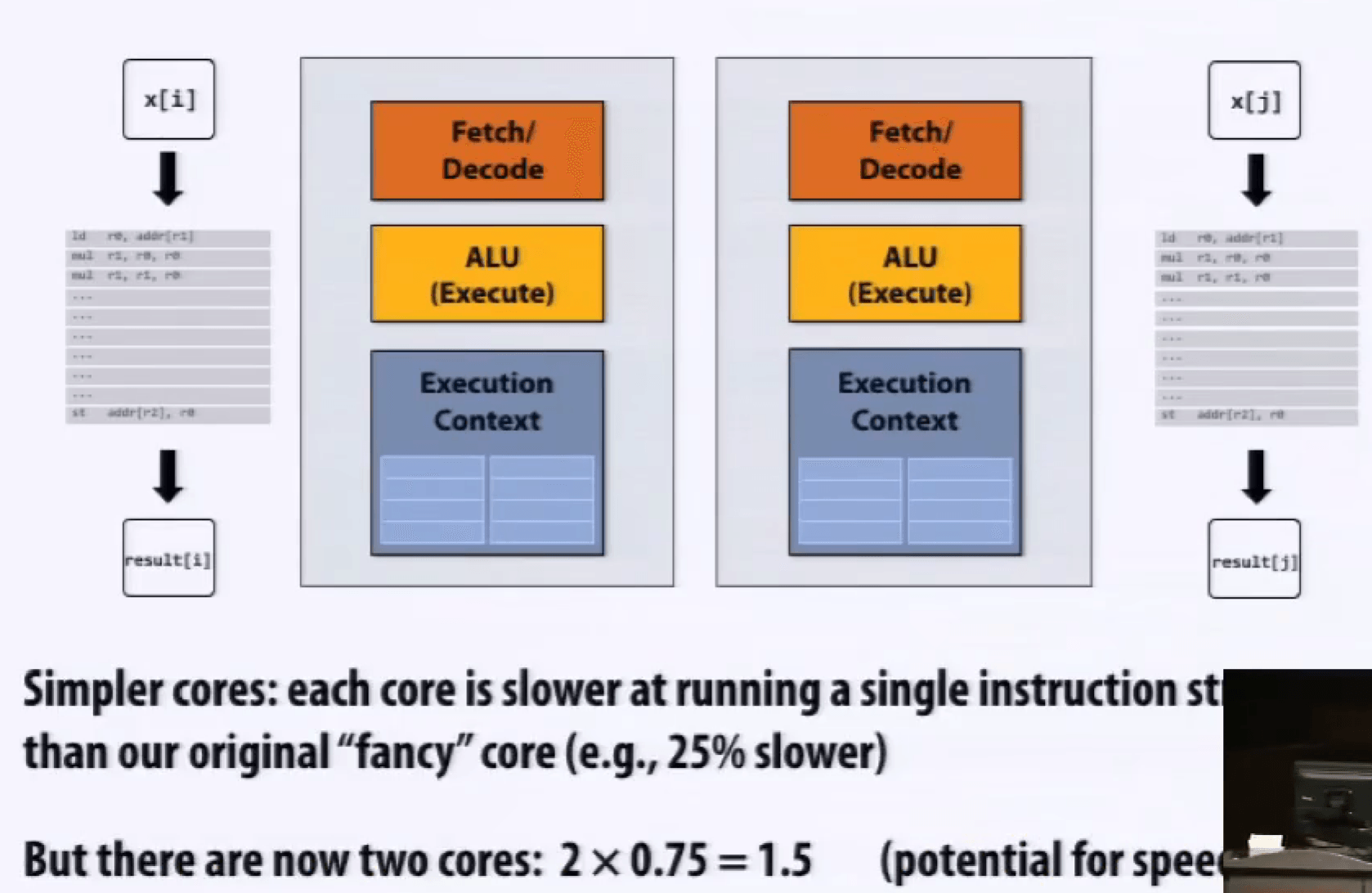
多核处理器如果遇到单指令流程序,不能加速。
标量程序与向量处理器,并不能加速,需要对应,SSE、AVX 指令,是 SIMD 指令。
多核和SIMD是正交的,可以结合。
多核、多线程、多核执行与SIMD执行,有区别,SIMD 需要共享指令流。
现代的非朴素的编译器,只有在判断条件符合的时候,才会尝试给执行里面的内容。
术语 Terminology
Instruction stream coherence 指令流一致性
一些列不同的逻辑序列能共享相同的指令流,有指令流一致性,在 SIMD 架构下运行的很好。
Divergent execution 发散执行
缺乏一致性。
cache coherence 缓存一致性
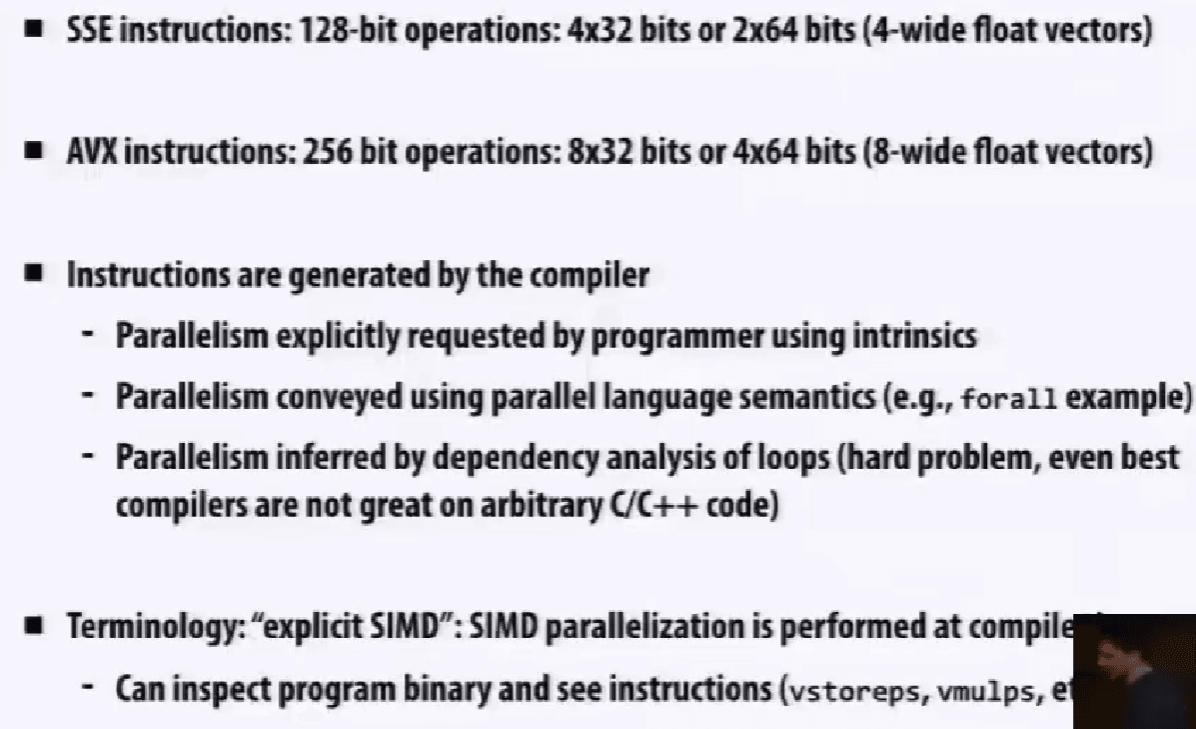
SIMD on CPUs,显式的。
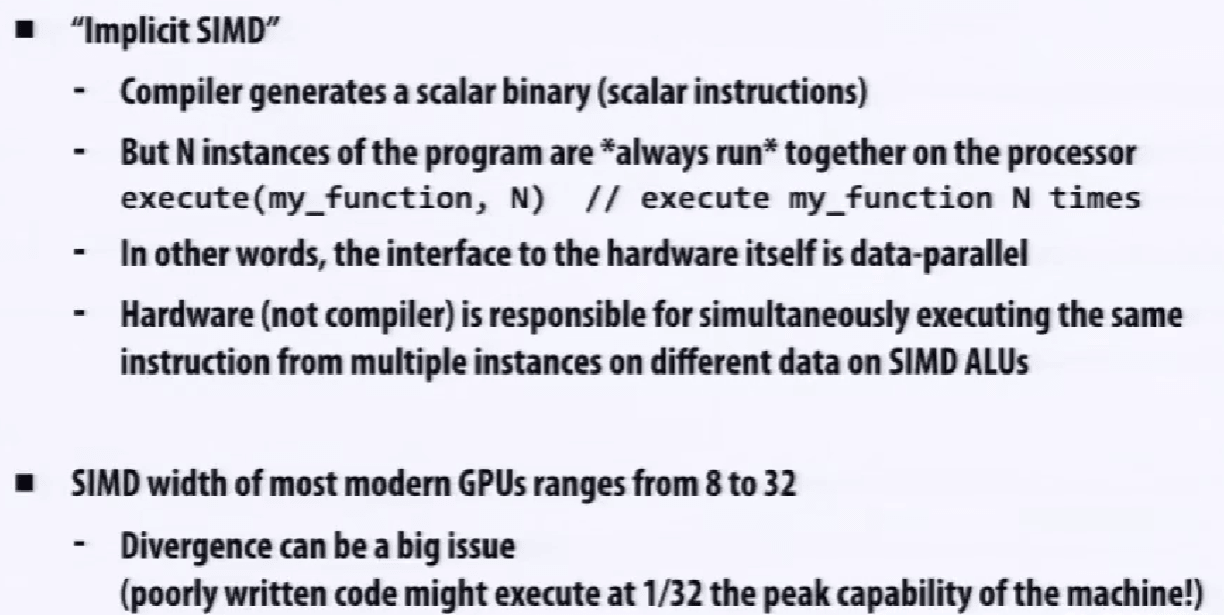
SIMD on GPUs,隐式的,更高层级的抽象。
描述机器,X cores, Y SIMD ALUs per core (SIMD width)
$\text{FLOPS} = \text{Frenquency(Hz)} \cross \text{Cores} \cross \text{SIMD width} \cross \text{MAD}$
A核B宽SIMD 与 B核A宽SIMD:指令流在 8 条一组下的一致性,可能不如 4 条一组。
总结
若干并行运算的方式:
Multi-core,多核,多处理核
thread-level 线程级并行(不同指令流在不同核上)
软件决定什么时候创建线程 e.g. pthreads
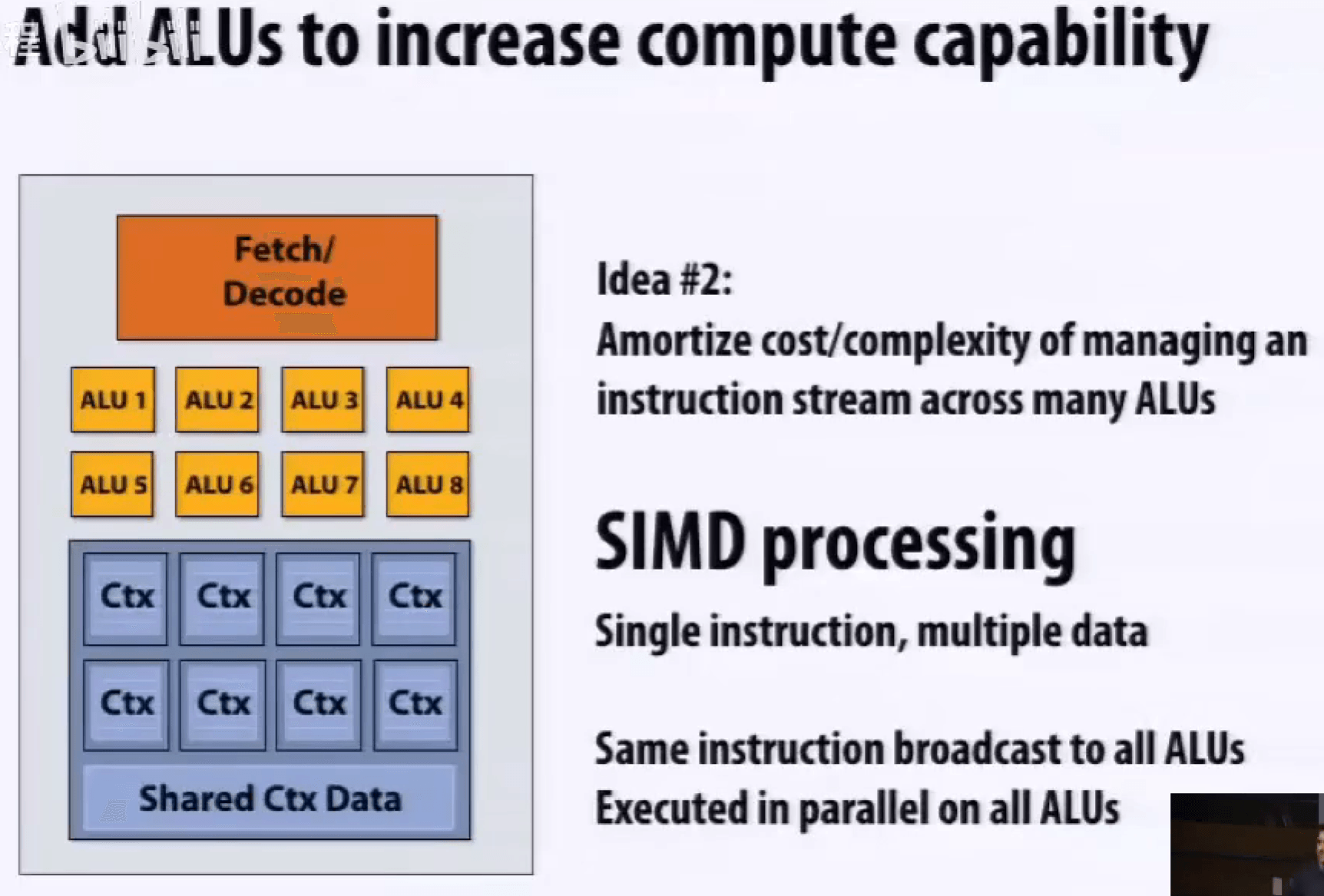
SIMD,多ALUs,被同一条指令流控制(within a core)
为 data-parallel 数据集并行设计,控制的开销被 ALUs 均摊
向量化被编译器(显式SIMD)、runtime 运行时完成。
需要被说明,或者需要被高级编译器的循环分析
Superscalar,超标量,利用一条指令流的 ILP 指令级并行(within a core)
硬件自动、动态的并行化。
超标量架构的CPU核心本身在一个时钟周期内就能执行多条指令。
(增加资源来提高峰值计算)
Part 2: accessing memory
术语,Terminology
Memory latency,内存延迟
内存请求的总时间,存/取。
latency 延迟是衡量某时间所需时间长短的指标。
e.g. 更快的车、更高的限速标准。
Memory bandwidth,内存带宽
bandwidth 带宽是单位时间内发生多少事情的指标。
e.g. 增加车道。
(两者的相关性取决于重叠处理程度)
stalls,在有依赖先前的指令的时候,处理器需要停顿。
比如,内存读流水线并行,可以提高带宽,但因为对比很长的读取周期,延迟可能没有太多变化。
cache,把降低内存加载的延迟,length of stalls(reduce latency)
prefetch,减少 stalls(hides latency)
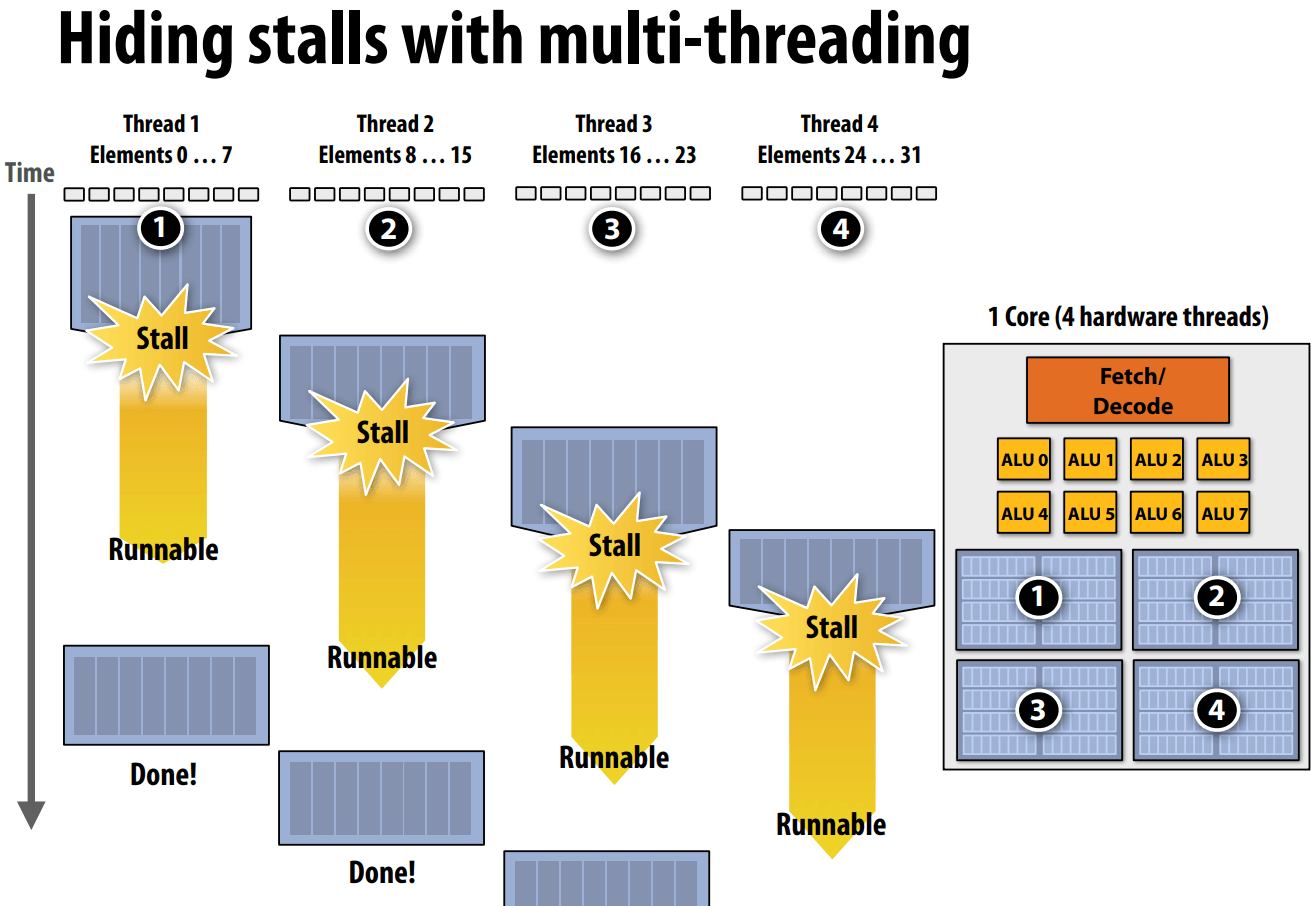
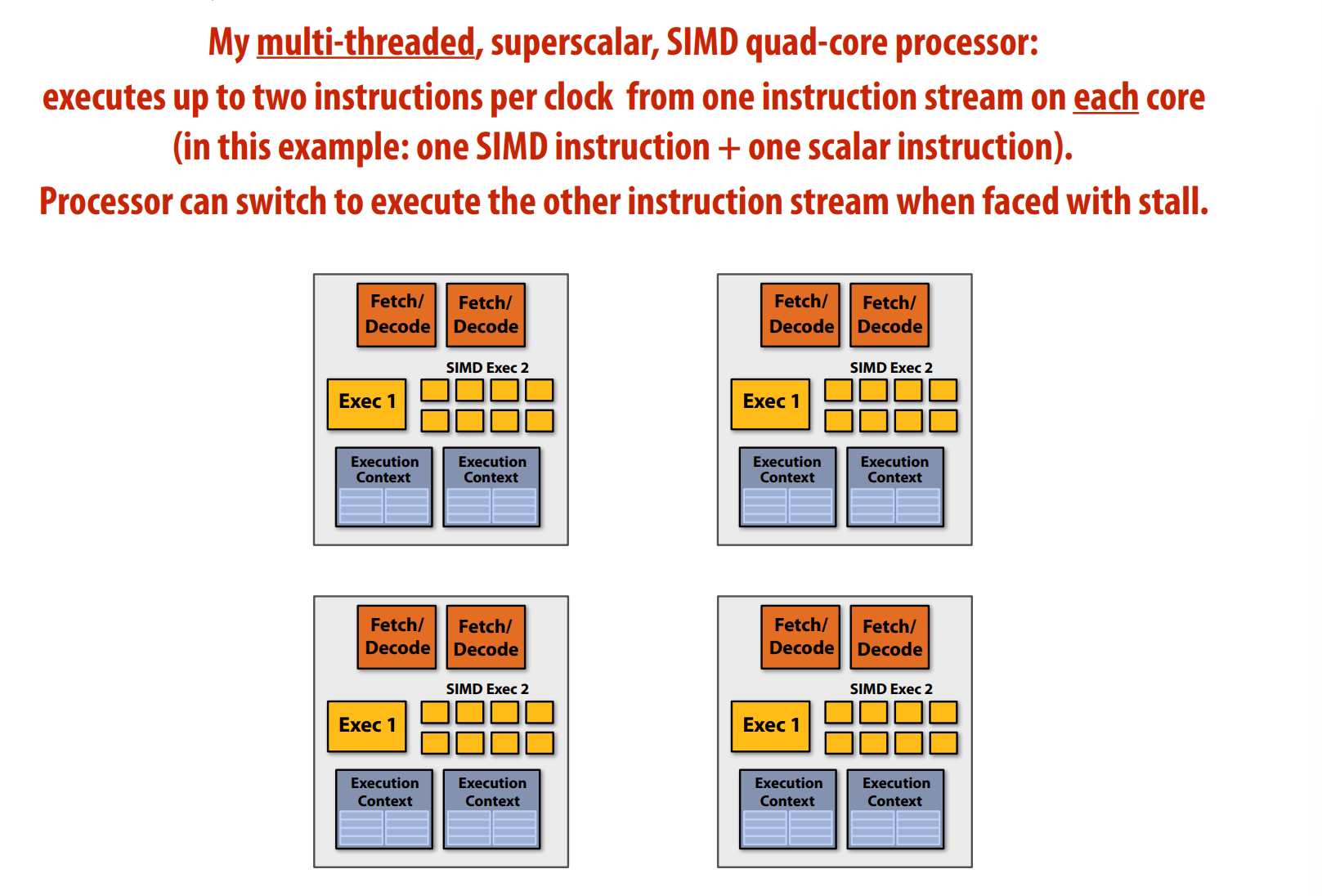
用 multi-threading 多线程来隐藏 stalls 停顿,切换线程;各自的寄存器组,对应各自的执行上下文,即可以在同一处理器下运行多条指令流。
缓解等待耗时长的操作(e.g. 内存访问),处理器的空闲时间变少了,处理器性能发挥得更加充分。
和 OS 的切换概念是相同的,机制是不同的,如果让 OS 来管理这个切换,开销大。
问题:上下文存储空间是有限的,Trade off。
更多但更小的上下文(更强的延迟隐藏能力)
更少但更大的上下文(更大的 L1 cache)
没有增加计算资源,提高了高效利用资源的能力。
这种模式有多个不同的版本:
Interleaved multi-threading (a.k.a. tmporal multi-threading) 交叉多线程 / 时间多线程
前面提到的技术
Simultaneous multi-threading (SMT) 同时多线程 / 同步多线程
每个时钟周期,核心从多个线程中选择指令去在 ALU 上运行
superscalar 的设计的扩展
e.g. Intel Hyper-threading (2 threads per core)
多线程的代价,假定 cache 没用,不是降低延迟,是通过做别的事情来隐藏延迟。
这也是 GPU 每个核心有很强的计算能力、很多线程,但是只有不大的缓存。
CPU 的每个核心有两个线程。
CPU 的设计是为了降低延迟;GPU 的设计是精细设计、减小 cache 体积,使得能集成大量的 ALU 来计算。
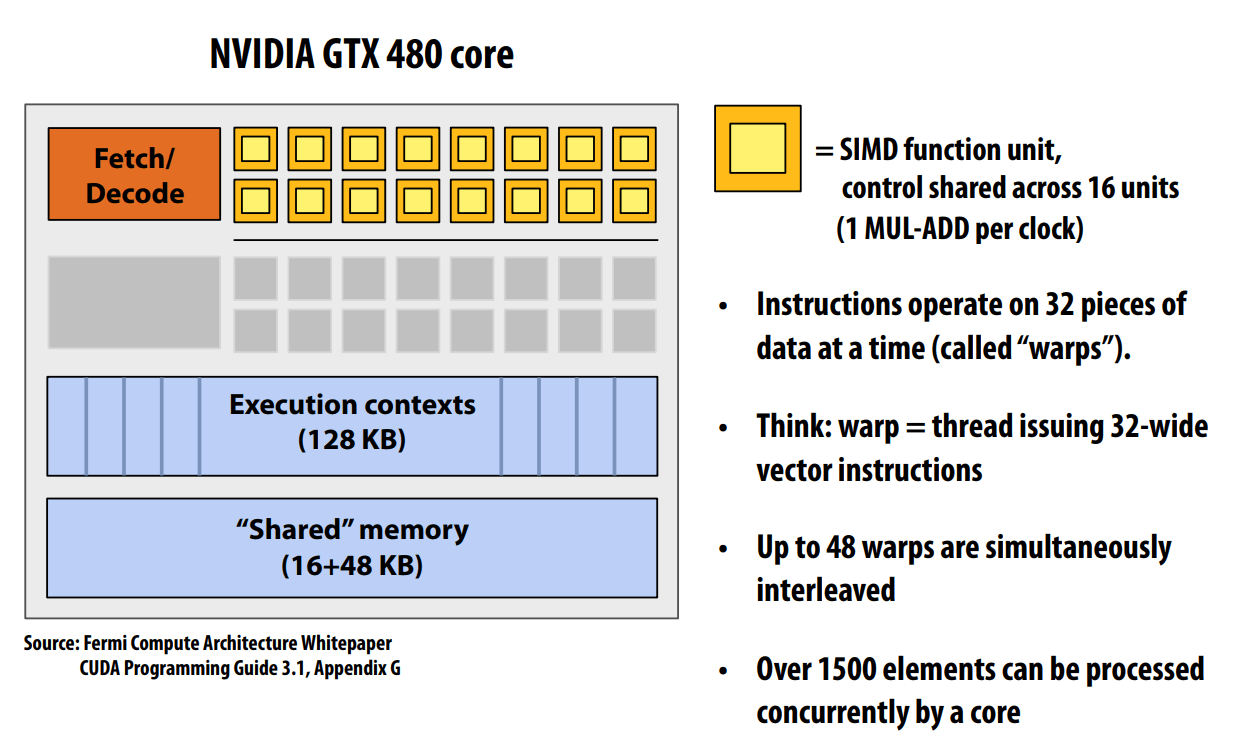
一个 Warp 的完整上下文,实际上是:
1 个程序计数器 (PC) 和 32 组通用目的寄存器 (General-Purpose Registers, GPRs),每个线程独享一组。
48 个交叉 warp 是 48 个执行上下文。
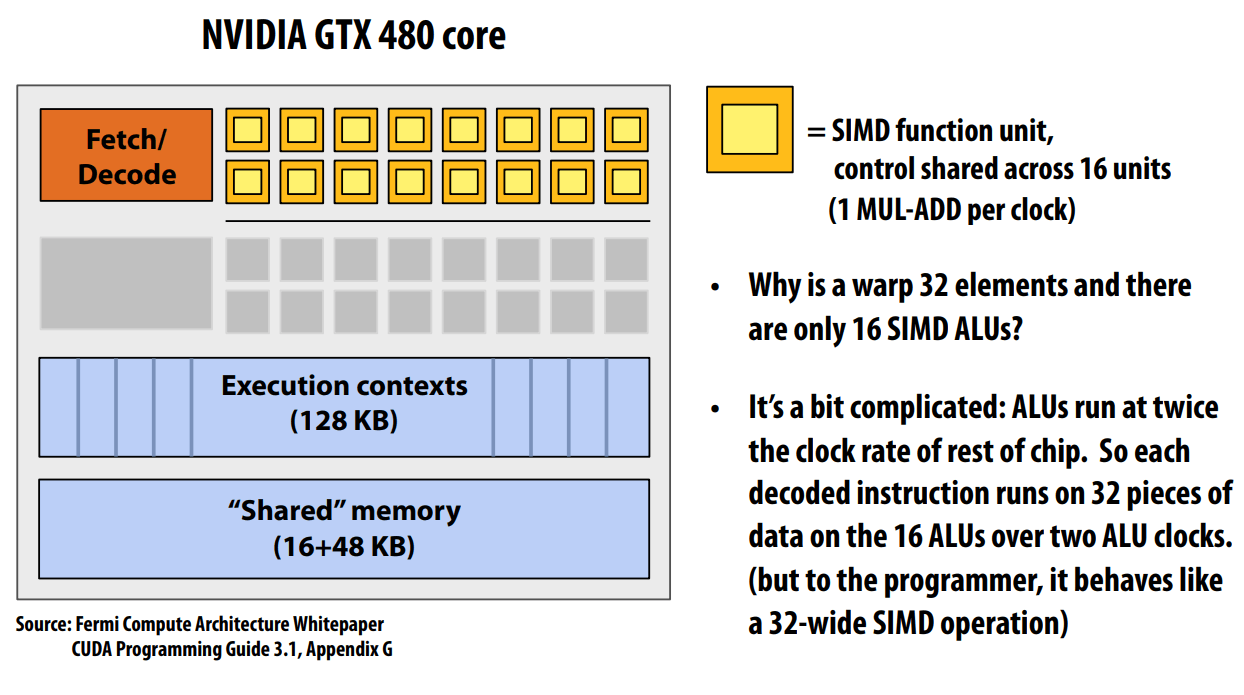
ALU 运行在两倍于芯片其他部分的时钟频率,所以,相当于是 32。
这个是 hot clocking (shader clock),但因为能耗太高,下一代架构就砍掉了(x
思维实验
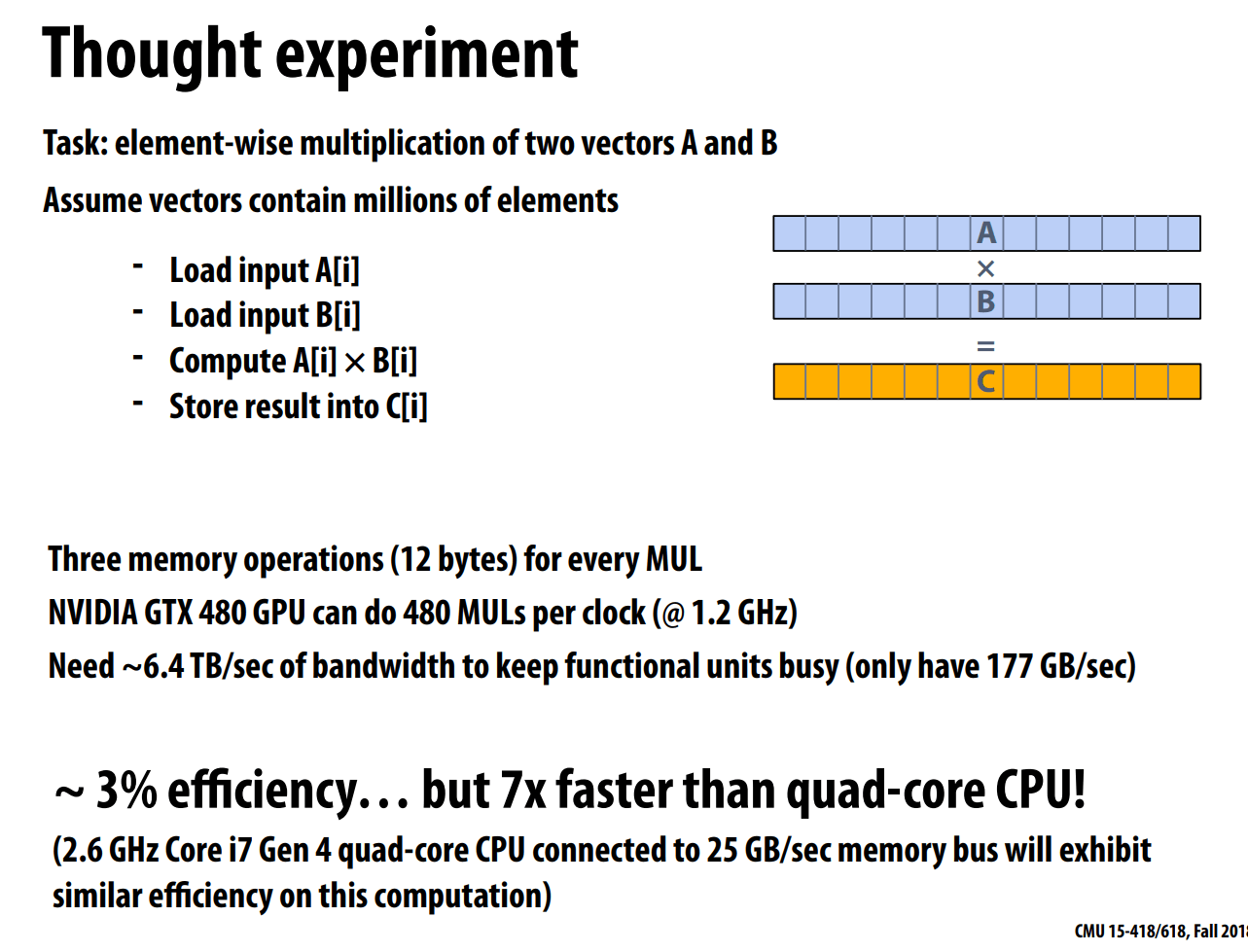
是不是一个好的并行程序。
pros: 可 SIMD,可利用多核,不可以隐藏延迟(?)
cons: 所需的内存带宽太大了,每个计算所产生的内存访问需要大大超出了现在的计算机设计。
实际上,由于内存带宽限制,在 CPU 与 GPU 上跑得差不多。
一个周期的 MADs $Core \cross SIMD \ function\ units = 15 \cross 32 = 480 $
一些术语:
- Multi-core processor
- SIMD execution
- Coherent control flow
- Hardware multi-threading
- Interleaved multi-threading
- Simultaneous multi-threading
- Memory latency
- Memory bandwidth
- Bandwideth bound application
- Arithmetic intensity
(高效利用资源)
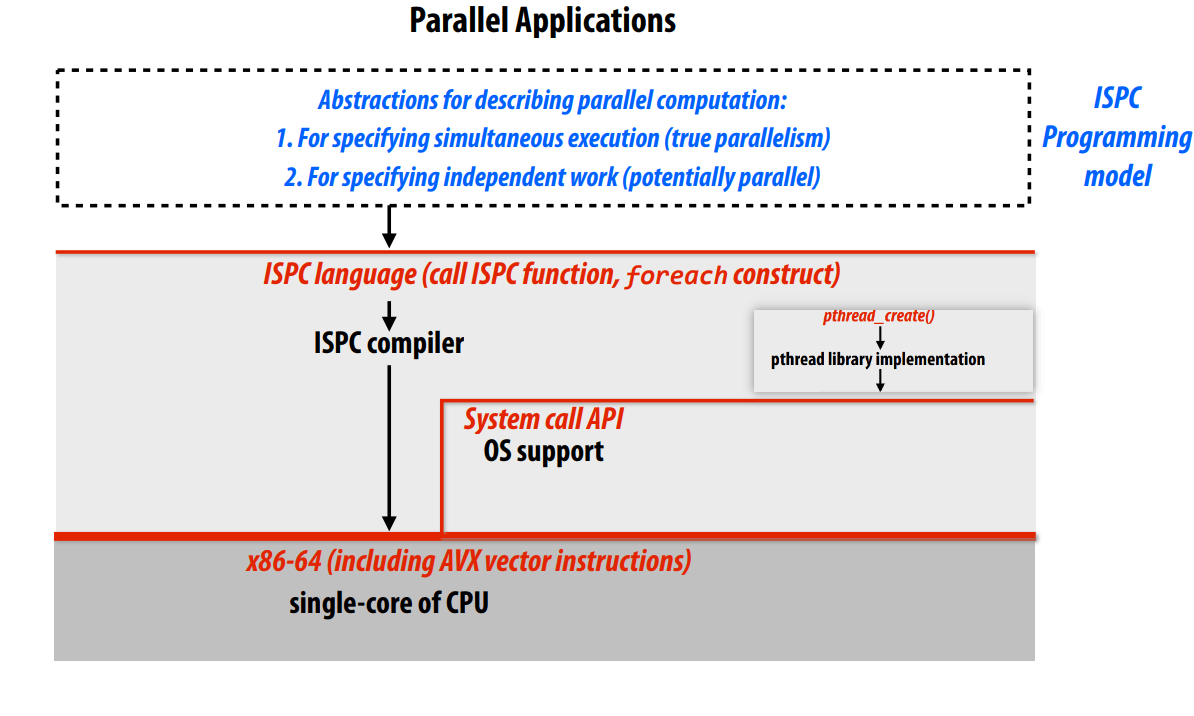
Parallel Programming Abstractions
Abstraction vs. implementation
task abstraction
Hyper-threading,超标量 + 多线程。
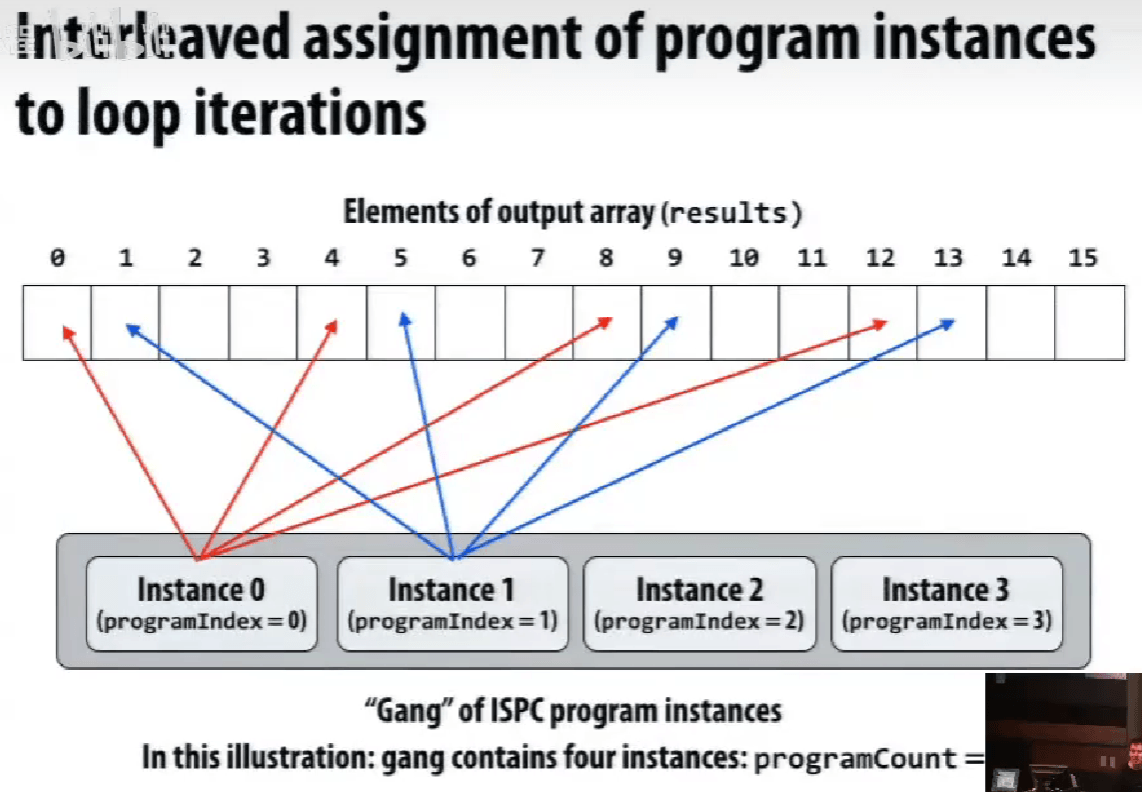
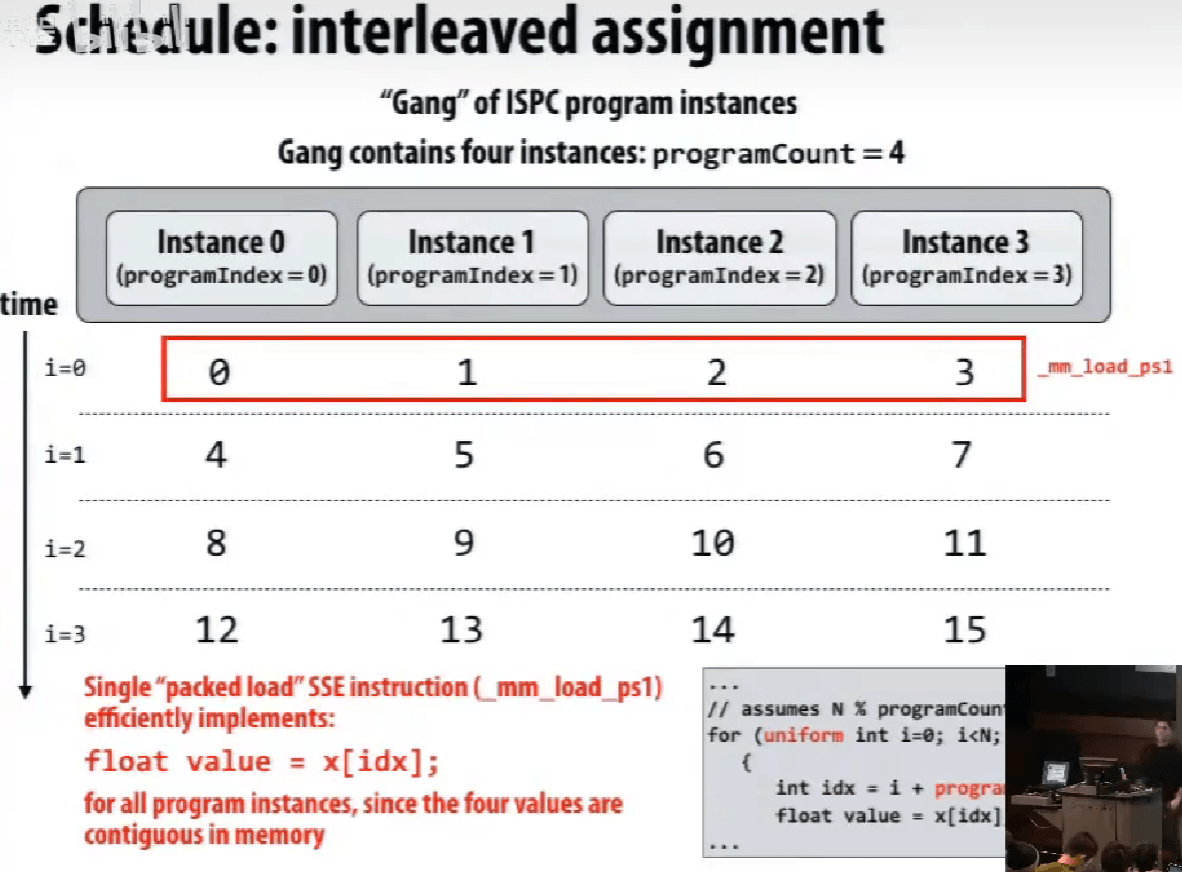
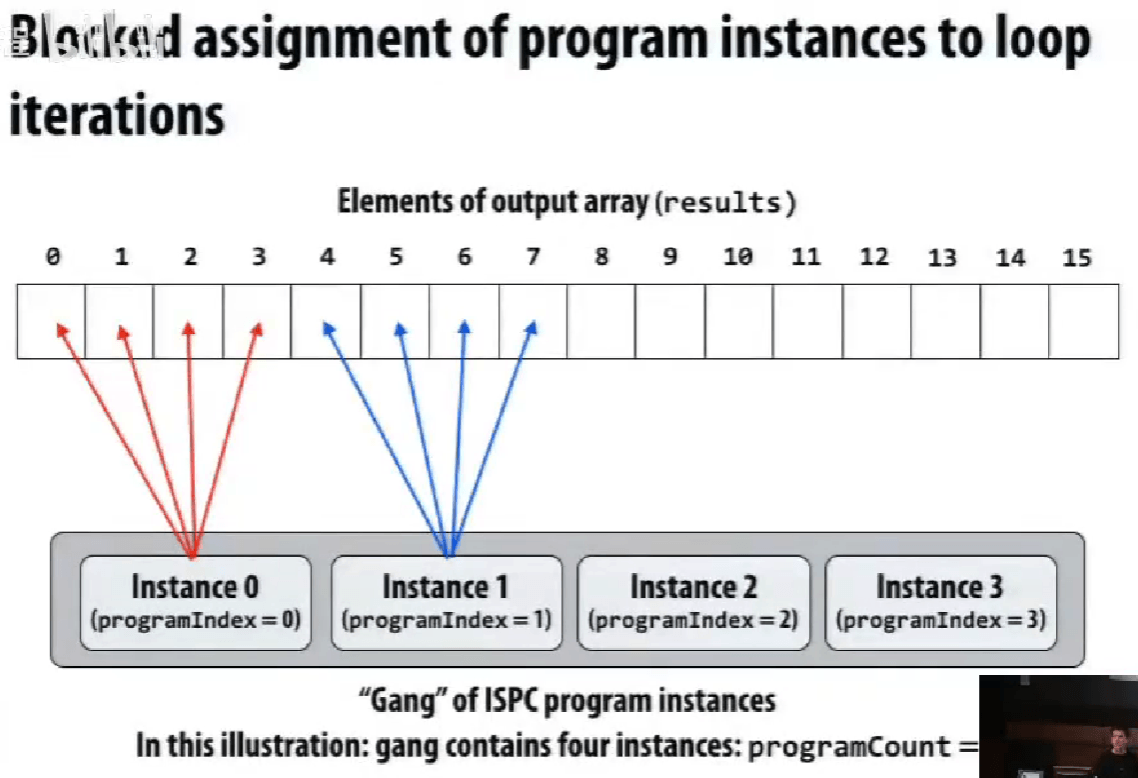
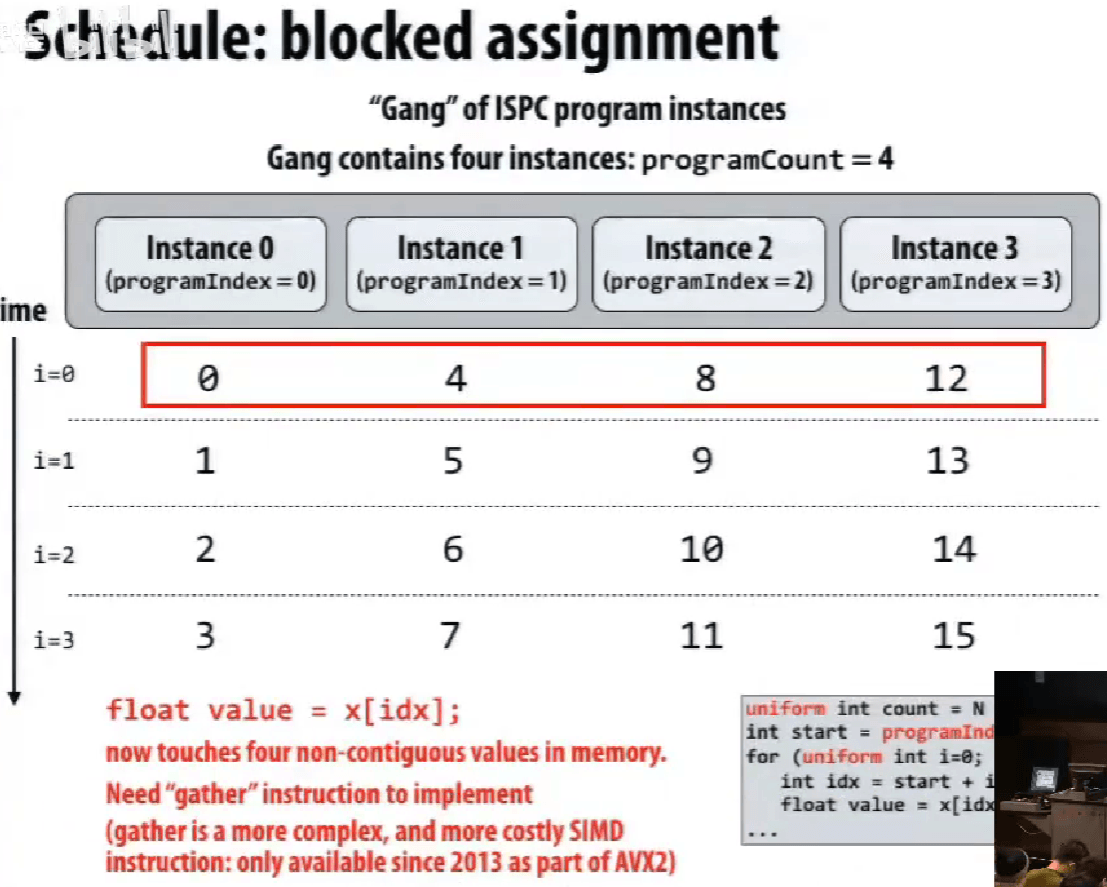
ISPC gang abstraction by SIMD on one core, programming instances
不同的映射方式 map,抽象的理解方式和实际的执行方式的不同。
实际不同实例是一起执行的,所以第一种才是连续的内存访问。
ISPC 只涉及到 SIMD 的实现,不涉及到多核处理。
在单个执行线程内,利用单个执行上下文,通过 SIMD 指令完成操作。
不能在 ISPC 函数中调用 ISPC 函数。
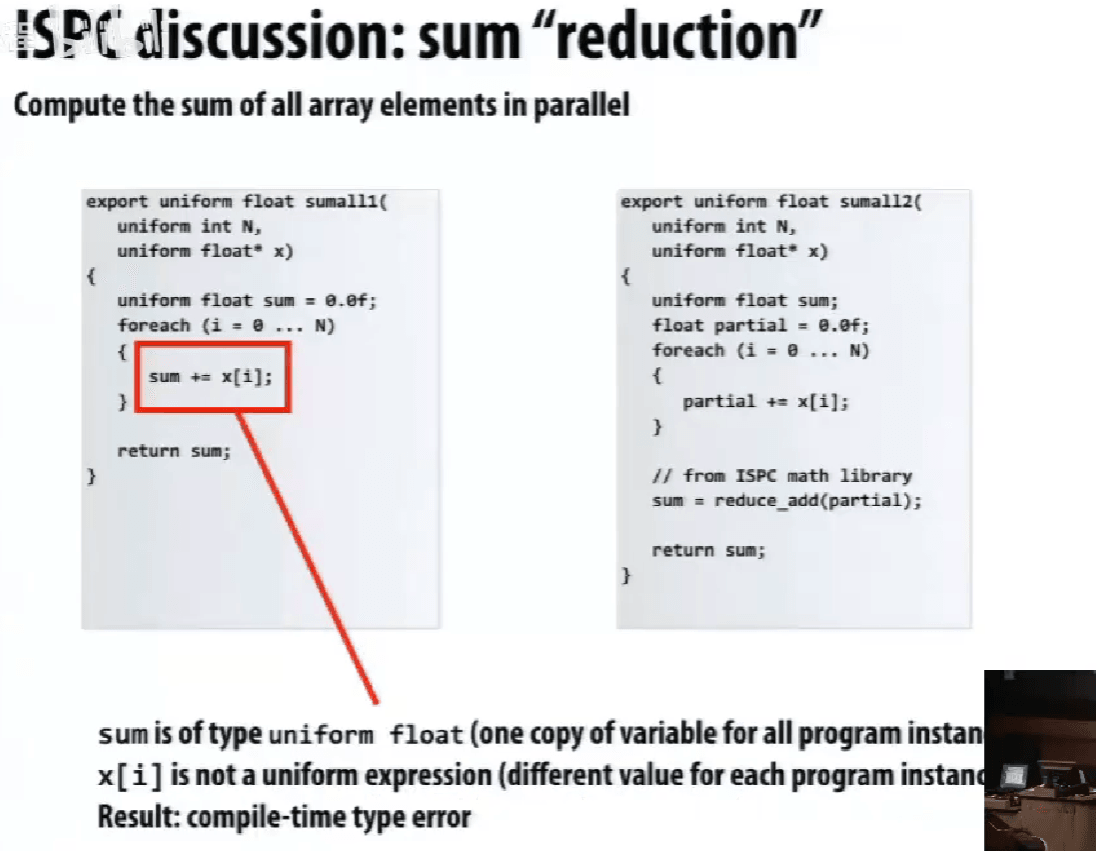
ISPC 归约求和,reduce_add(),
spawn gang, tasks。
向上、向下表达的层是什么?
Three models of communication (abstractions) 通信模型抽象
Shared address space
共享地址空间通信模型,抽象化共享内存地址空间。
线程之间通过读/写共享变量来通信。
同步原语 e.g. locks,也是通过共享变量实现的。
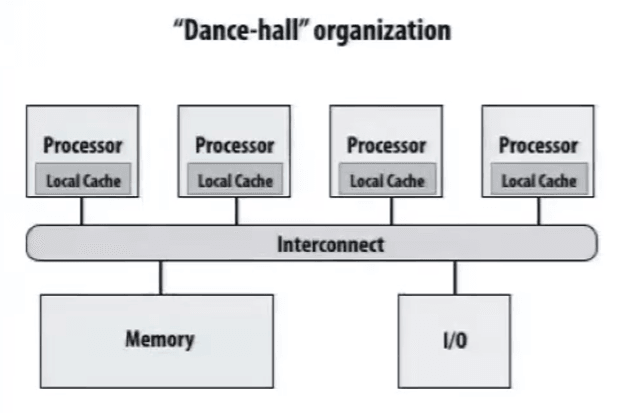
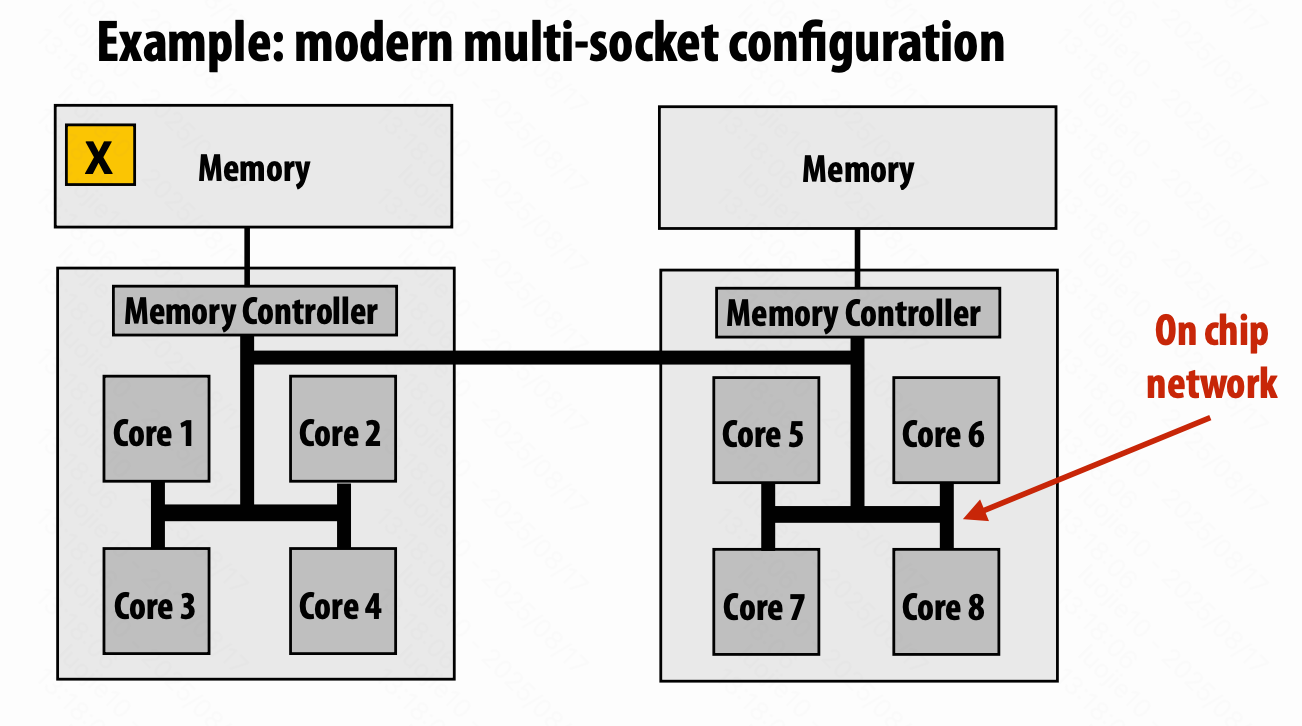
如果想要放很多的核心,很容易产生瓶颈,所以出现设置分区,Non-uniform memory access (NUMA),比如 cache。
Message passing
消息传递模型,线程操作自己的私有地址空间,通过显式的收/发信息来通信。
Data-parallel
对数组中的元素执行同样的操作,如 SPMD 编程(ISPC),集合中的元素是独立的。
stream programming 流式编程
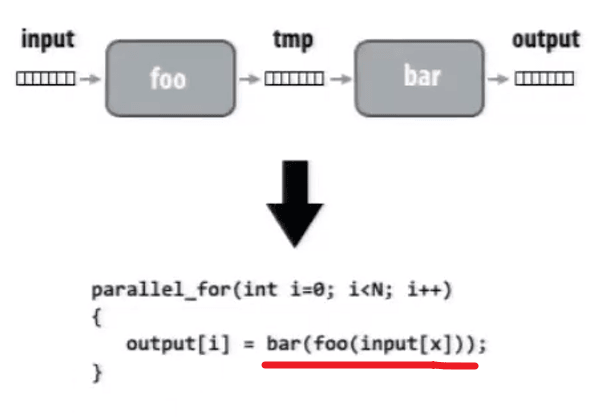
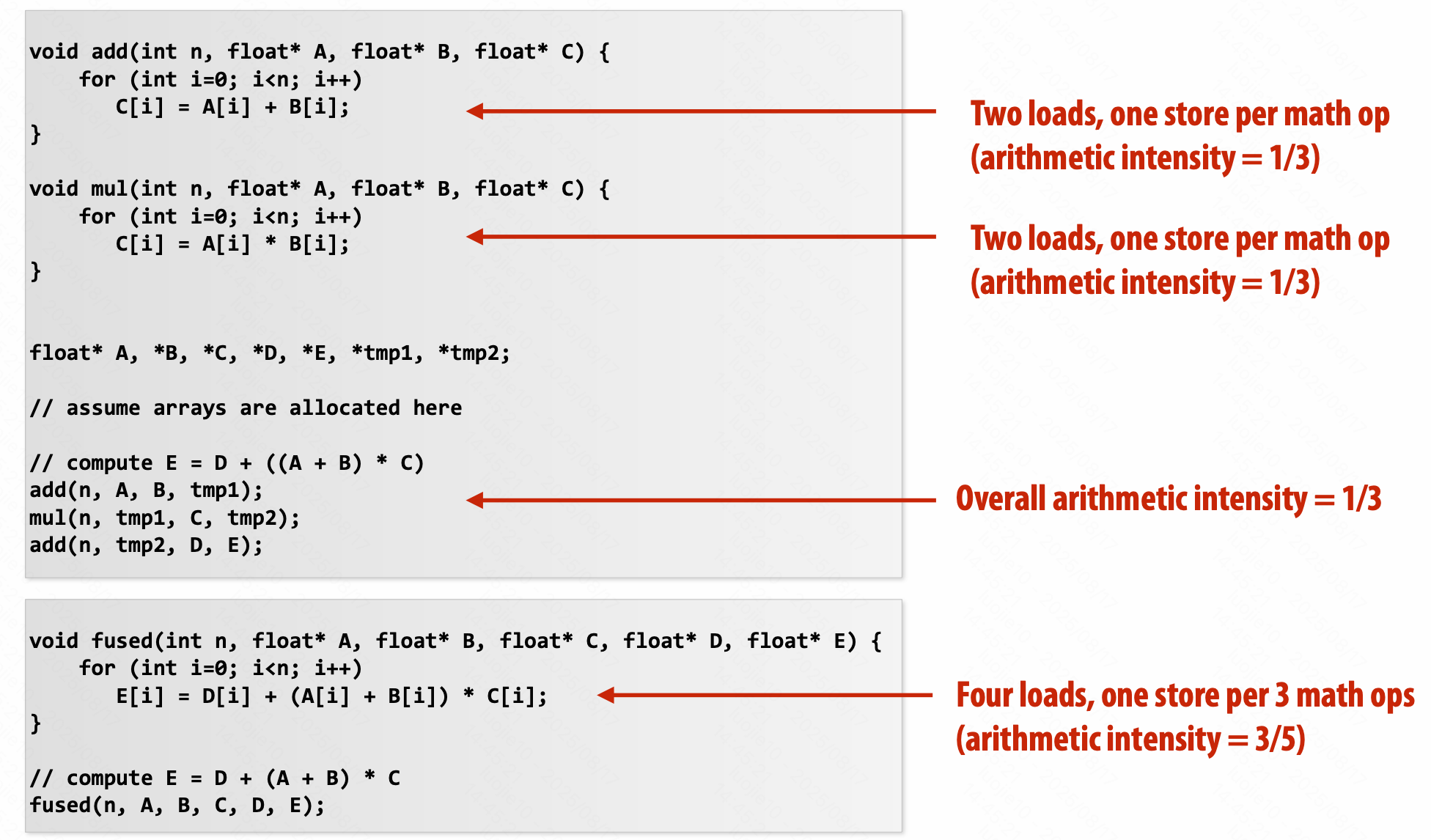
优点:如上图,从 read - operate 1 - write - read - operate 2 - write 变成 read - operate 1 & 2 - write,减少了内存带宽的压力。
(给定相关信息,编译器能够优化)
缺点:需要引入新的操作符。
数据流操作:分散scatter和聚集gather。
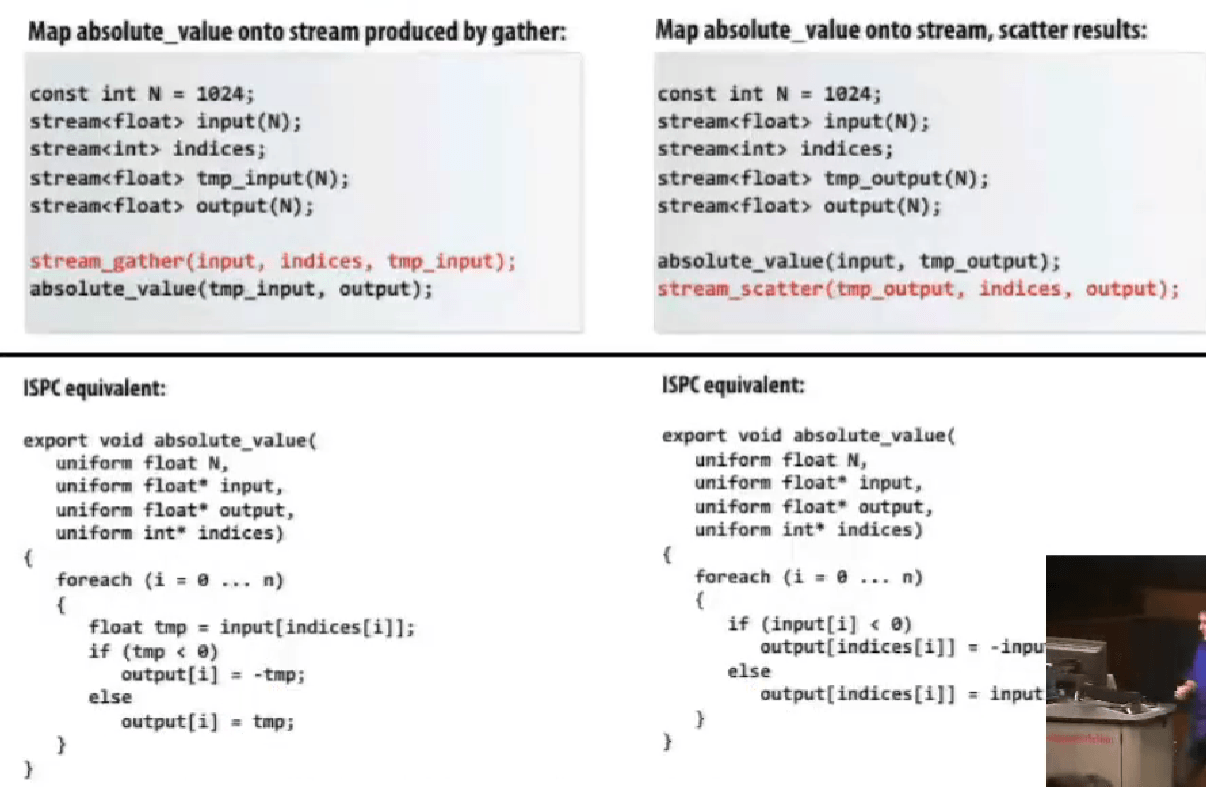
cache 命中问题?所以,这样的指令是 costly 的。
一段代码意味着什么,程序语义是什么,怎么实现的。
Parallel Programming Basics
创建并行程序:分解Decomposition, 分配Assignment, 编排Orchestration, 映射Mapping。
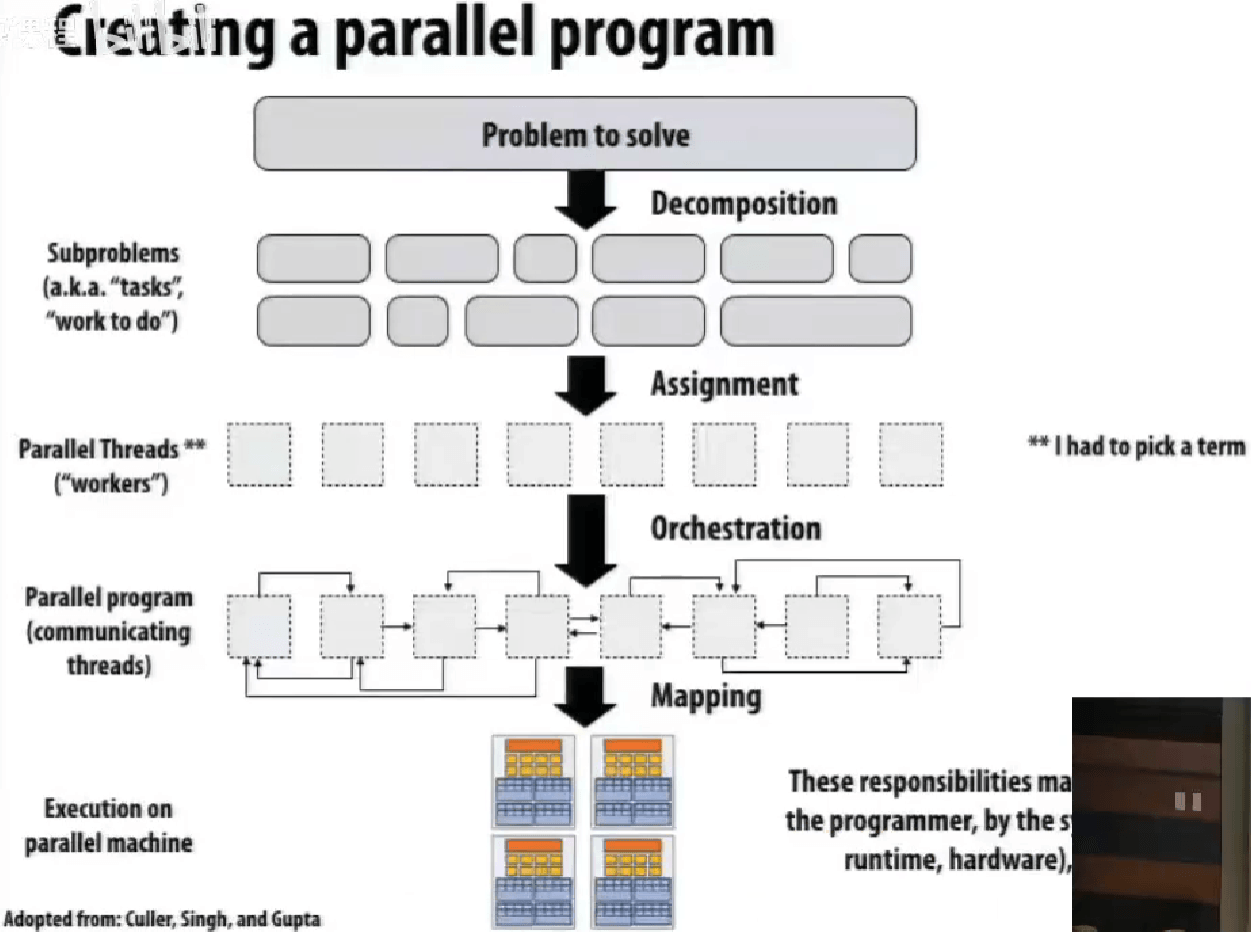
分解 Decomposition
分解不一定是静态的,创建至少足够的任务去让执行单元繁忙。
关键,独立identifying dependencies。
阿姆达尔定律 Amdahl’s law:
需要顺序执行的部分,s,$\text{speedup} \le \frac{1}{s + \frac{1-s}{p}}$。
程序员需要声明哪些部分是独立的。
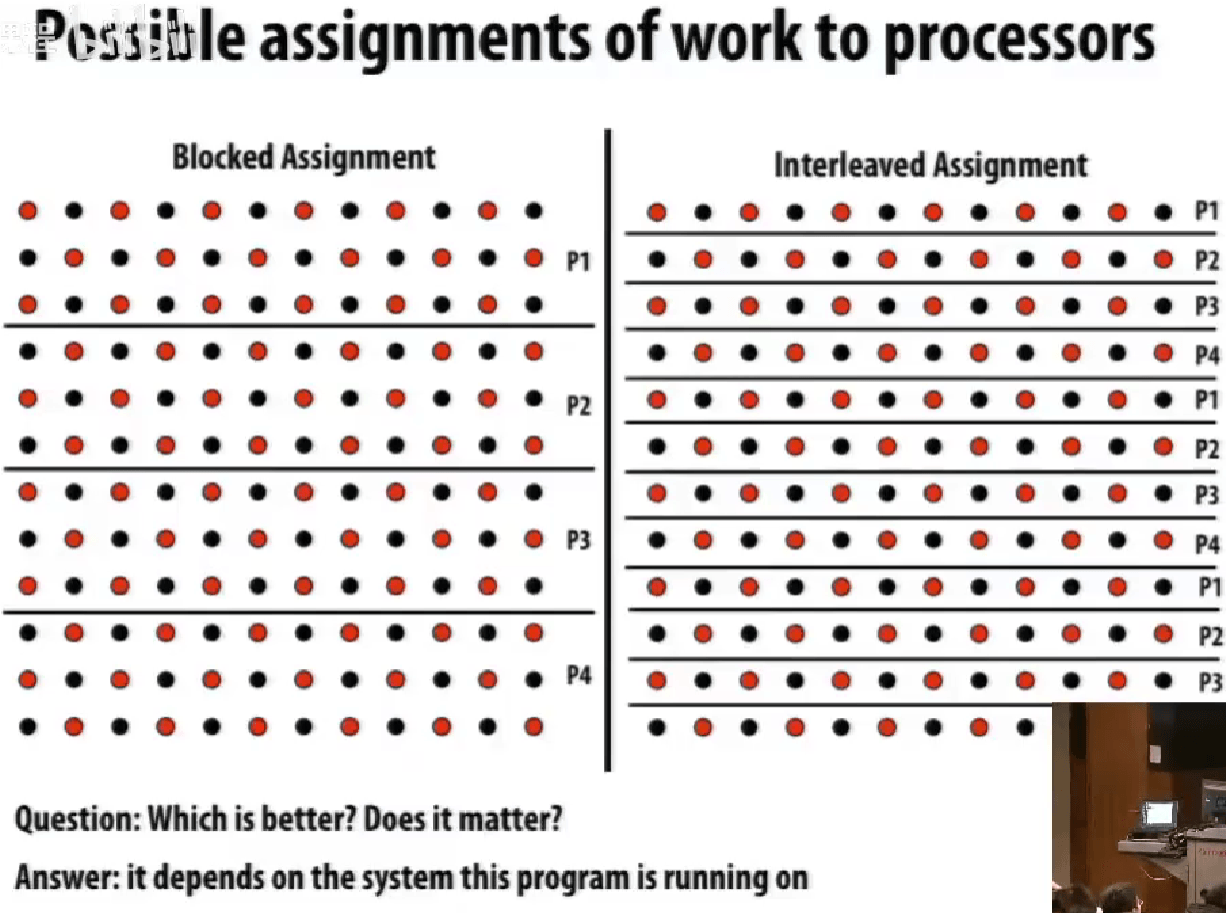
分配 Assignment
在 ISPC 的例子中,使用 foreach比手写 programIndex与 programCount要更有可移植性,因为更高层级的抽象可以让编译器根据硬件去选择优化。
系统上创建线程的开销,不可忽视,特别是创建的线程数很多的时候。
一般创建线程数就是执行上下文的总数,然后作为 worker pool,用 next_task 等。
编排 Orchestration
略,后续课程具体讲。
包括结构化通信、同步、组织数据结构、安排任务。
减小通信/同步开销,保持局部性等。
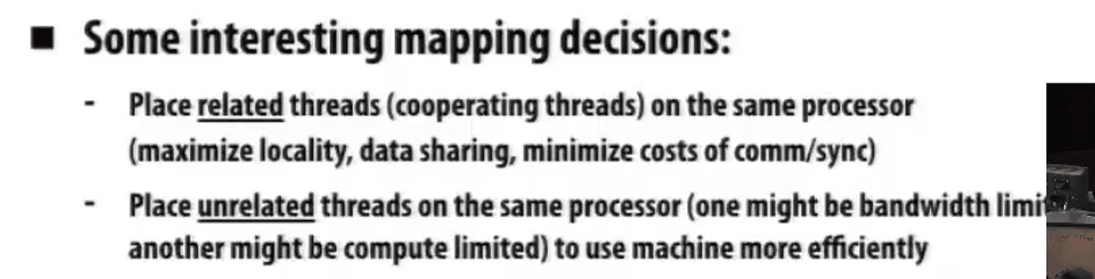
映射 Mapping
映射"threads"(“workers”)到硬件执行单元。
- 系统 OS,e.g. pthread to HW execution context
- 编译器 compiler,e.g. ISPC program instances to vector instruction lanes
- 硬件 hardware,e.g. CUDA thread block to GPU cores
用 Gauss-Seidel 解决偏微分方程 PDE。
从左上至右下,每个元素取十字相邻的五个元素(包括自己)的均值。(是直接利用最新版本的数据更新的)
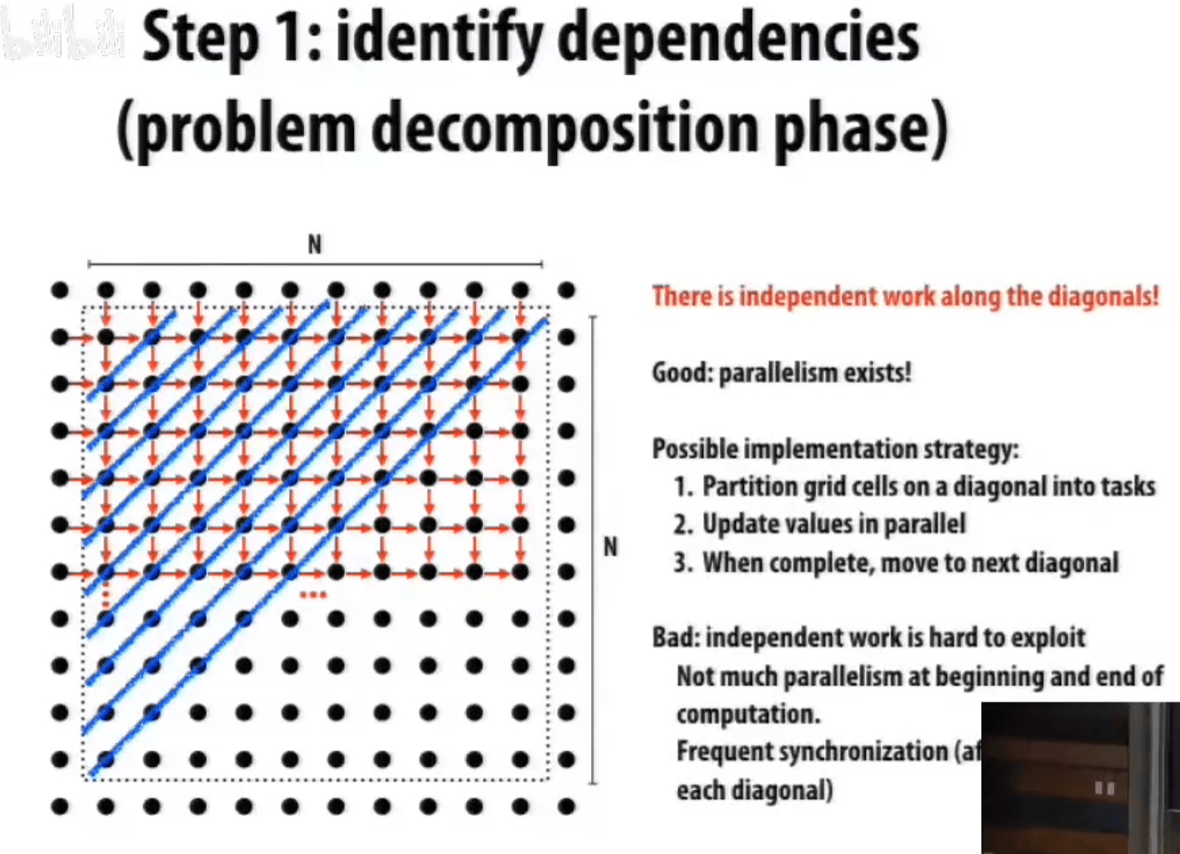
如果强行要求并行版本的结果与串行执行版本一致,我们找到的独立/并行的元素是对角线,多轮迭代同时进行,仍然效果没有那么好。
改变算法执行顺序,更加适合并行化(尽管会带来少许结果的不同)。
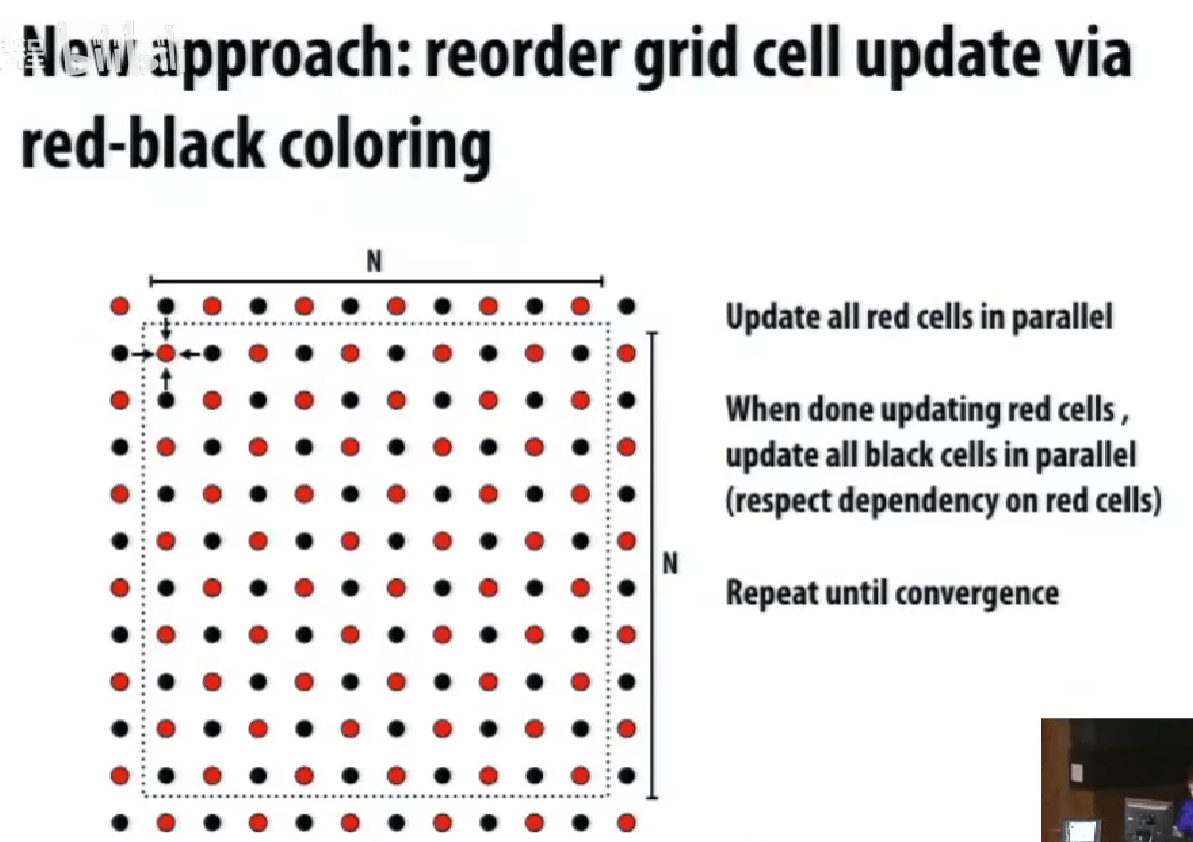
打破原本的依赖关系。
交替执行红黑块。
wait <=> barrier,barrier(myBarrier, NUM_PROCESSORS)都需要到,才会继续运行,尽可能减少 barriers。
因为不少应用的的解法来自统计计算,所以可以去为了提高并行度,而降低些准确性。
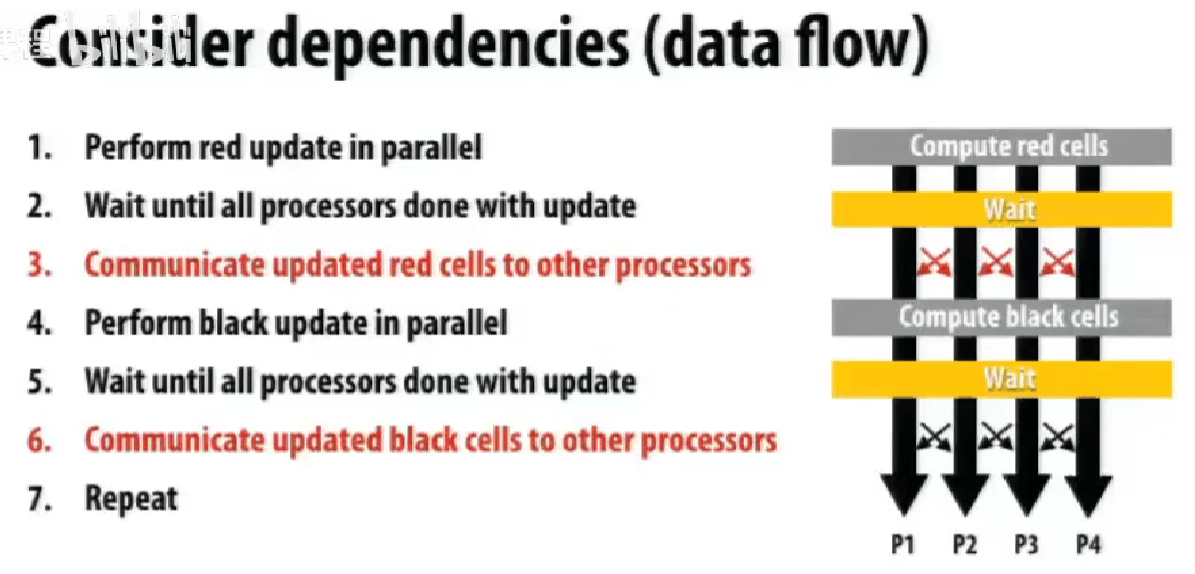
需要通信的情况。
编排 Orchestration 使用花括号、系统函数。
Part 1: Work Distribution and Scheduling
核心目标(其中有冲突):
- 均衡负载
- 减少通信(stalls)
- 减少额外工作(overhead)
建议一、总是先实现最简单的解决方法,再测试性能,判断是否需要做得更好。
Balancing the workload
static assignment
静态分配,简单、不会有额外运行时的开销。
当工作的花销和任务的数量是可预测的时候,可以去提前想出好的分配方案。
就算每一份工作不是平衡的,只要是可预测的,也可以提前调度。
“semi-static” assignment
较近的未来是可预测的,如自适应网络。
分配方案在重新调整的时候是静态的。
(重建分配是静态的)
dynamic assignment
在运行时确定,lock。
控制同步的开销,增大任务粒度(一次通信做更多的事情)
均衡任务大小(均衡负载和最小化分配开销之前)
优化任务调度(把大任务也切成小任务来调度、可能增加同步开销,关注量而非数量调度、先分配大任务)
分布式队列降低同步开销(从别的任务队列中「偷」任务)
有依赖的任务队列?
Schedule fork-join parallelism
大任务分解成若干个小任务并行执行,然后将这些小任务的结果合并,分治。
| |
抽象层面想好了,具体实现的话,如果为每一个 cilk_spawn 创建一个线程, cilk_sync 使用堵塞,显然会有很重的线程创建开销。
具体地,我们可以使用线程池的方式实现。
Child Stealing vs Continuation Stealing
续体优先(Run continuation first, child stealing):
- BFS
- 这种策略是让父线程继续执行
cilk_spawn之后的代码(在此例中为bar();),而将foo()排入可执行任务队列,以供当前线程或其他线程稍后执行。 - 优点:父线程继续执行可能减少上下文切换的开销,并利用现有的局部性。
- 缺点:如果
foo()很重要或者非常耗时,推迟其执行可能会影响程序的整体性能。
子任务优先(Run child first, continuation stealing):
- DFS
- 这种策略是立即执行
foo(),而将续体(bar();)加入任务队列,以供其他线程"窃取"(stealing)执行。 - 优点:这可以快速启动可能的重要或复杂的并行任务,尽快获得其计算结果。
- 缺点:可能导致父线程的局部数据和状态被挂起,增加了线程间切换的可能性。
steal 从工作队列的队头还是队尾 steal?
- 设计 deque 双端队列。
- 当前 thread 从 botttom push/pop,其他 thread 从 top 进行 steal,避免锁同步。
只要空闲,还有任务可以偷,就偷。
堵塞之后的任务不一定还在主线程上运行。
Part II: Locality, Communication, and Contention
shared address space model
抽象的具体实现。
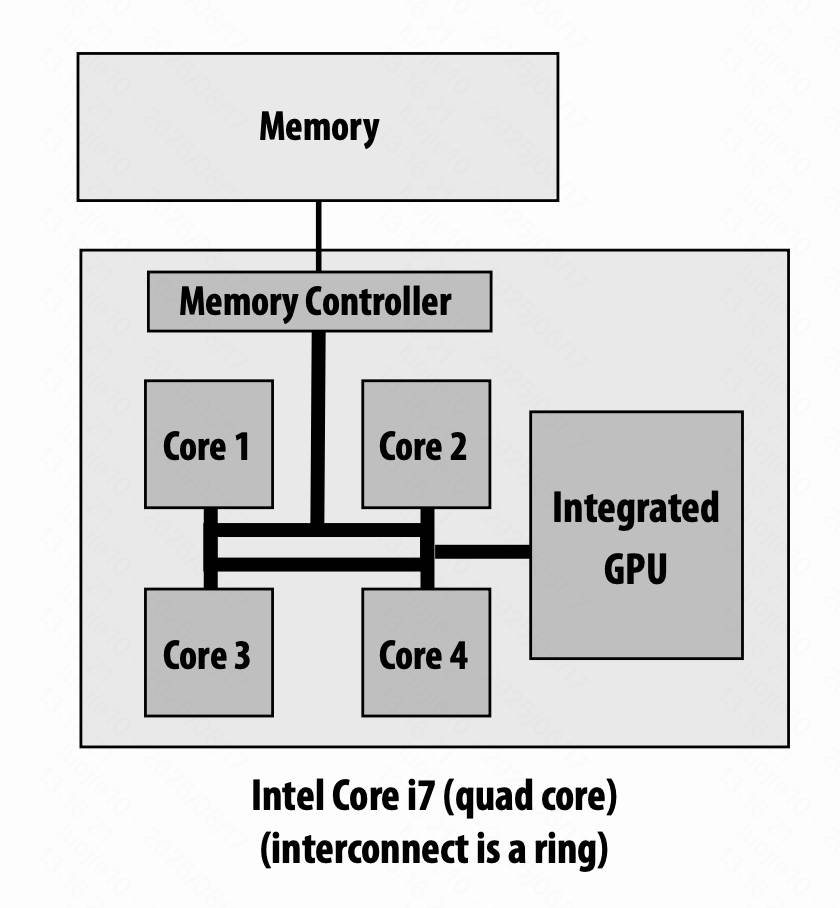
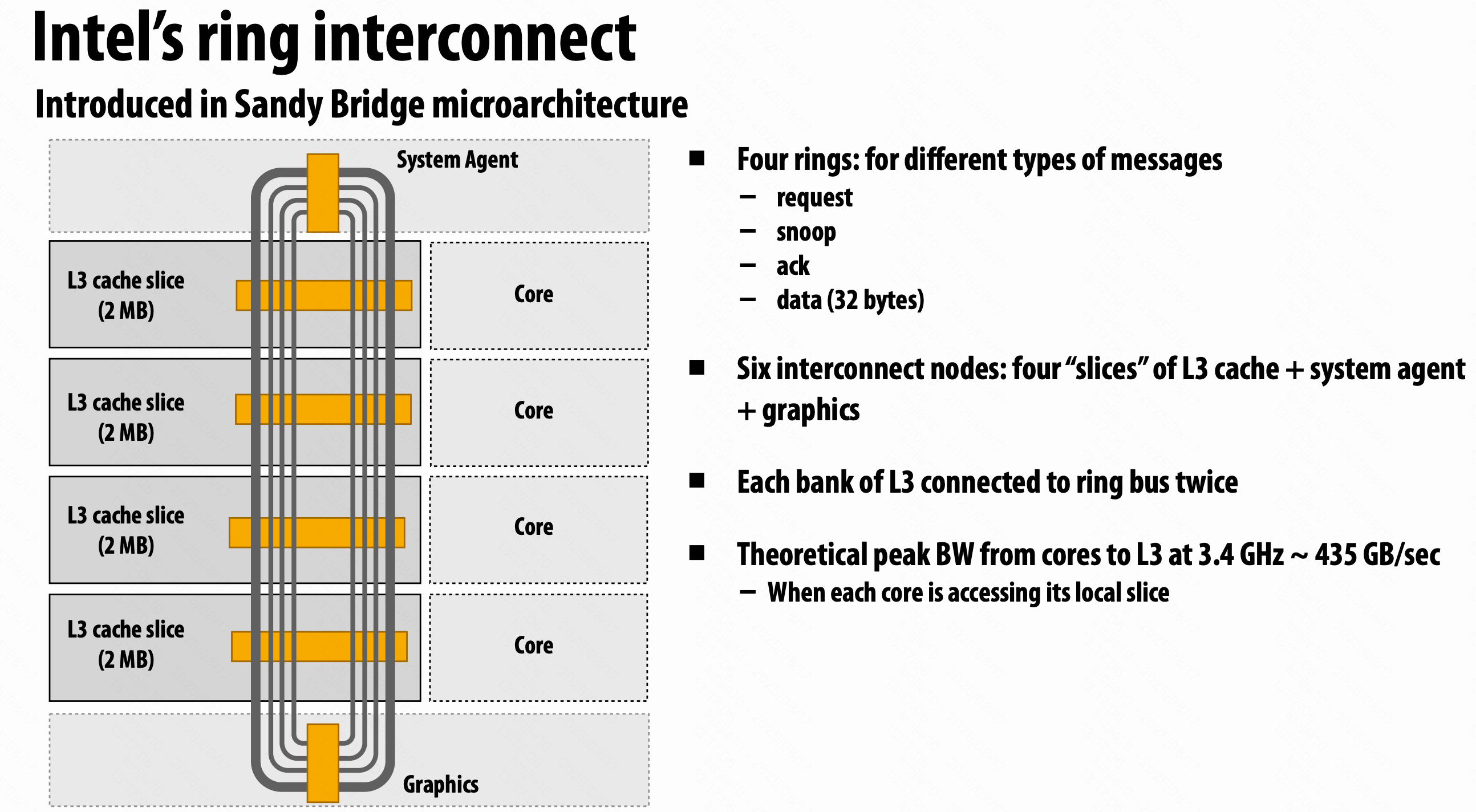
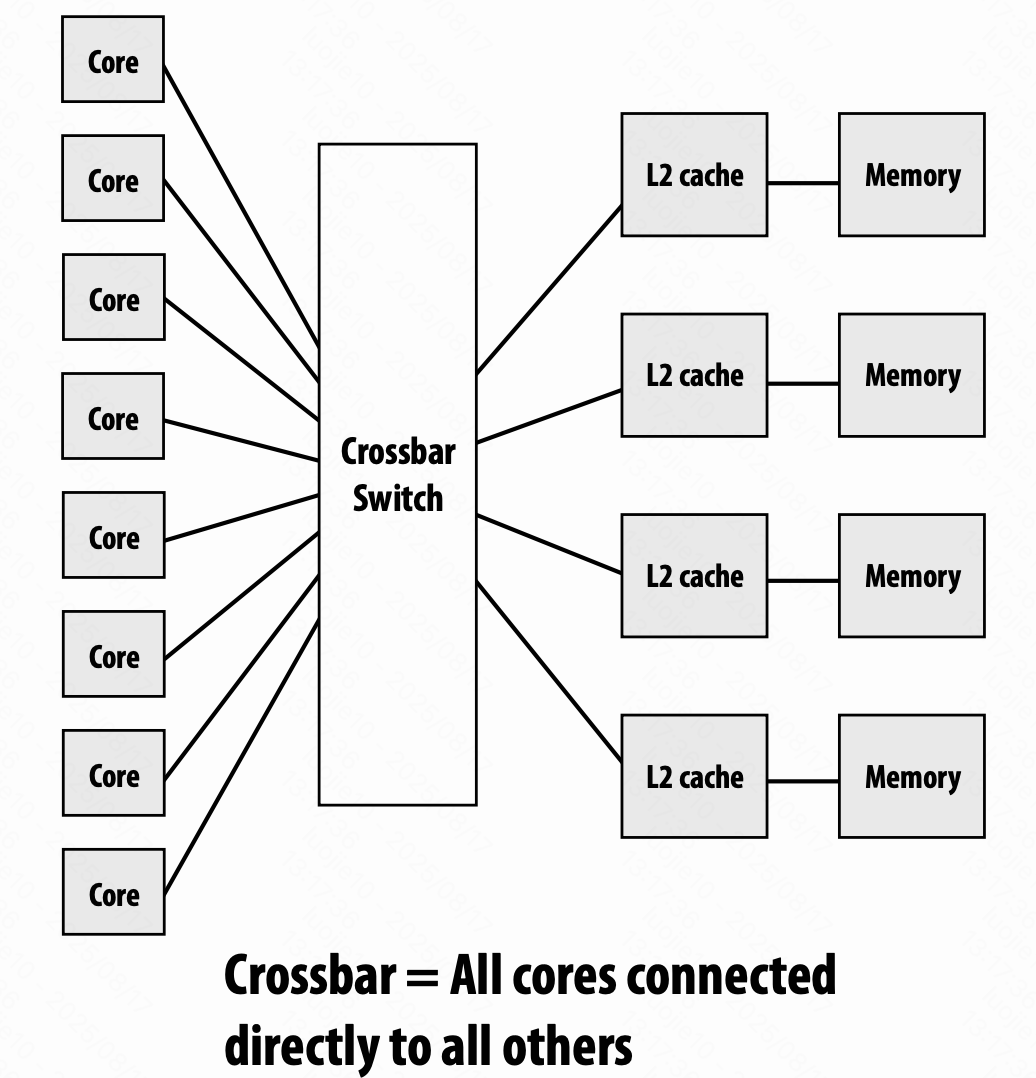
共享地址空间硬件结构
Message passing
send(), recv()。
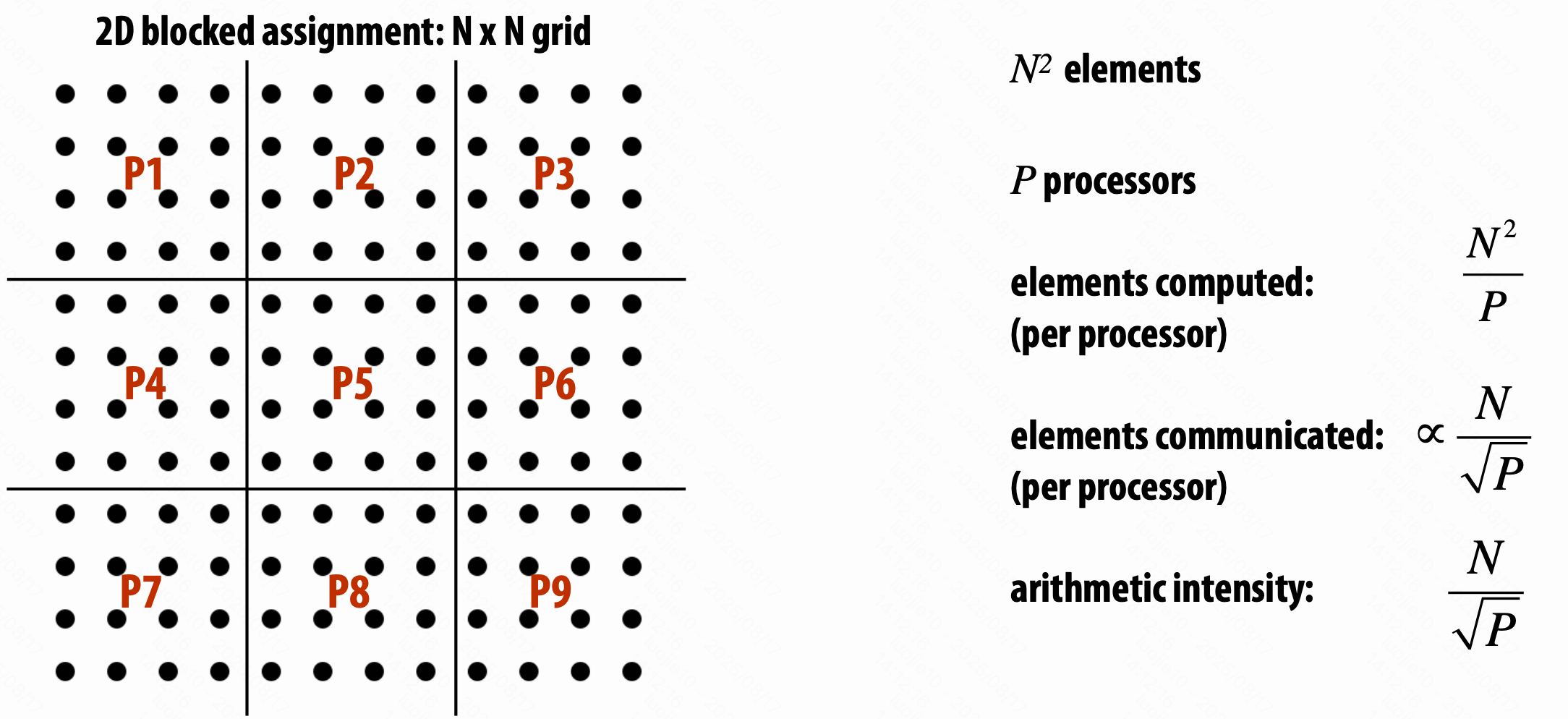
Arithmetic intensity 计算强度
$\text{Arithmetic intensity} = \frac{\text{amount of computation (e.g., instructions)}}{\text{amount of communication (e.g., bytes)}}$,越高越好。
如果分子是计算的执行时间,这个比率给出了代码平均所需的带宽。
$\frac{1}{\text{“Arithmetic intensity”}} = \text{communication-to-computation rate}$
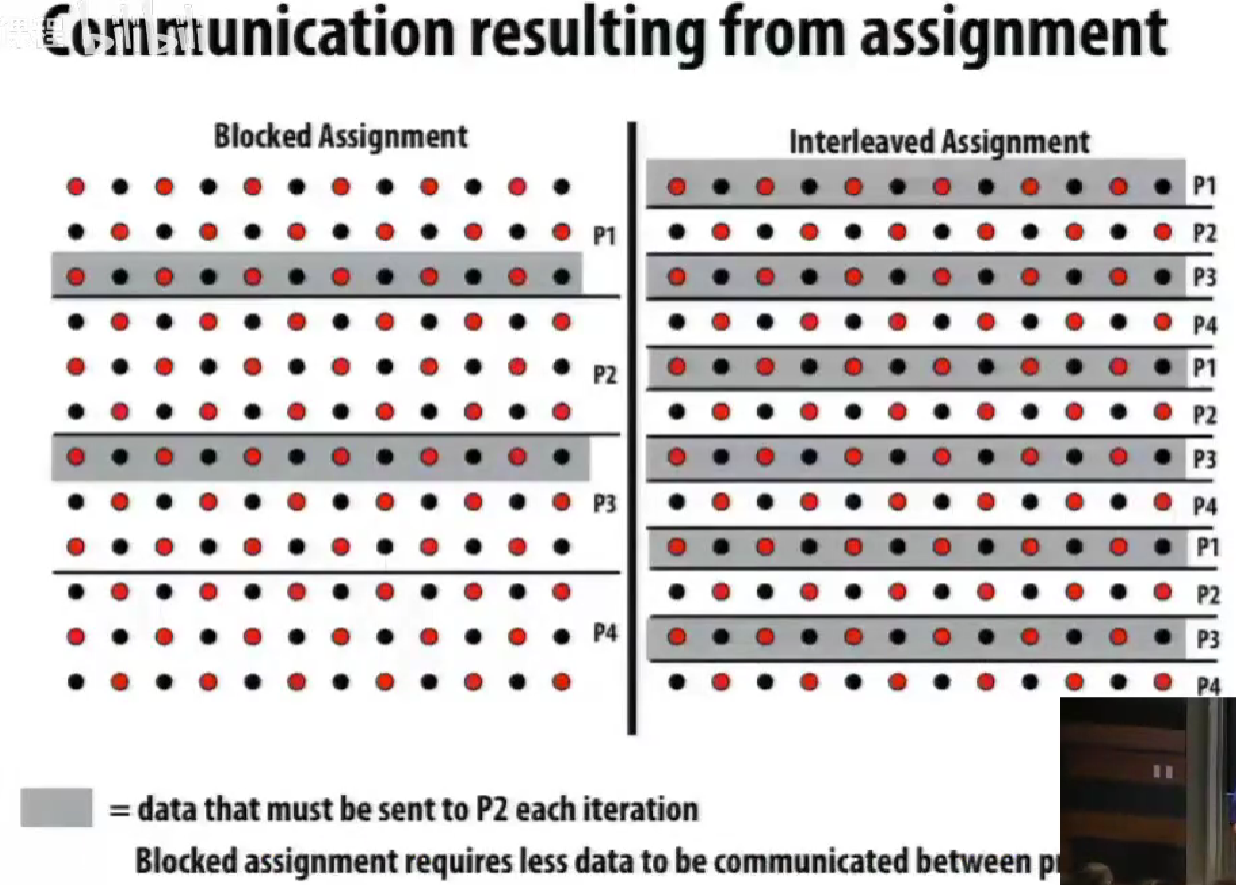
通信的两个原因:
inherent communication,算法成立的固有的通信
分配得更加合理,可以减少固有通信。
人为造成的(系统的具体实现导致的)
如和 cache 的表现相关、系统的数据转移的最小粒度、实际上只要写入,但是 cache 还是会读入 cache line。
Techniques for reducing the costs of communication
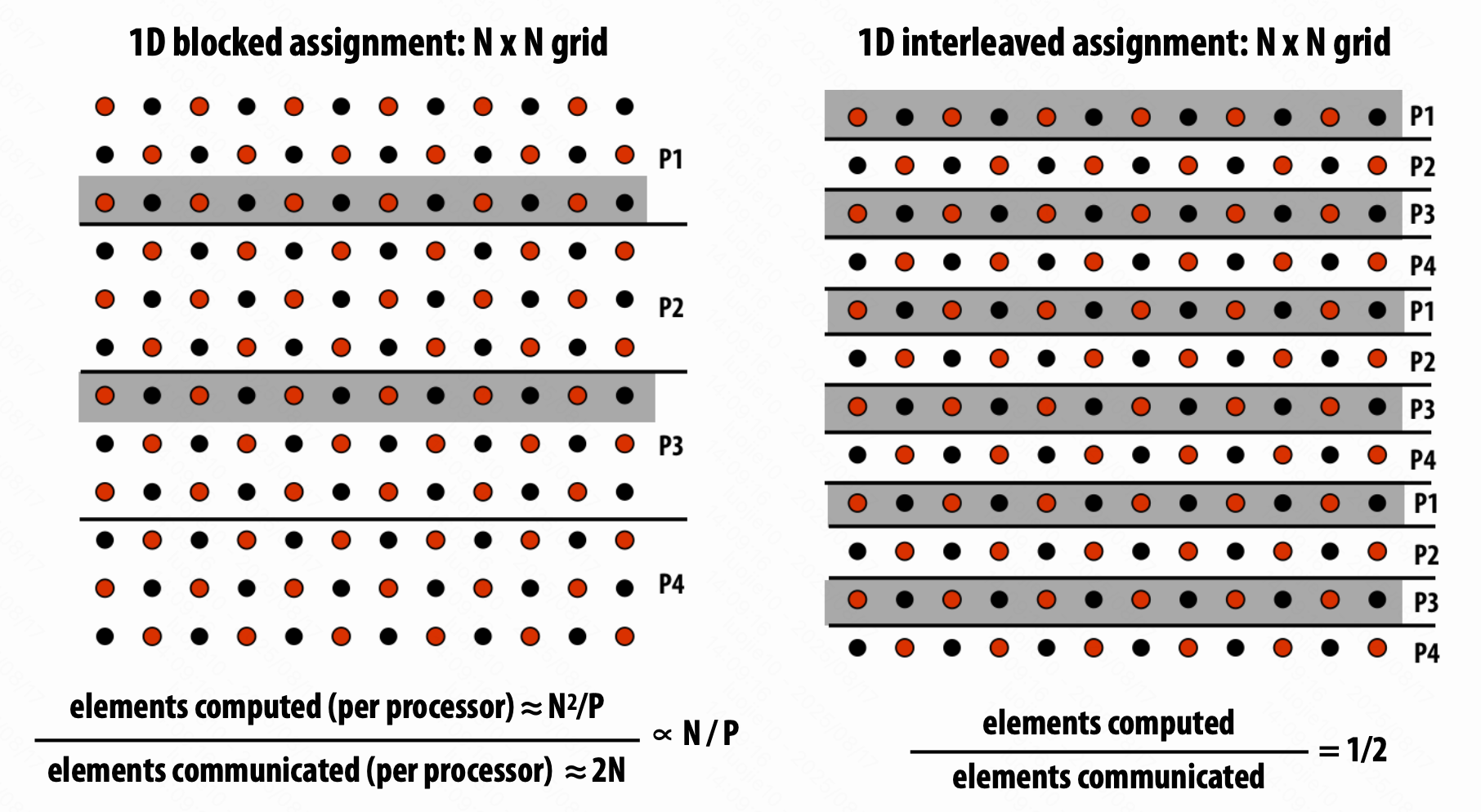
提升空间局部性
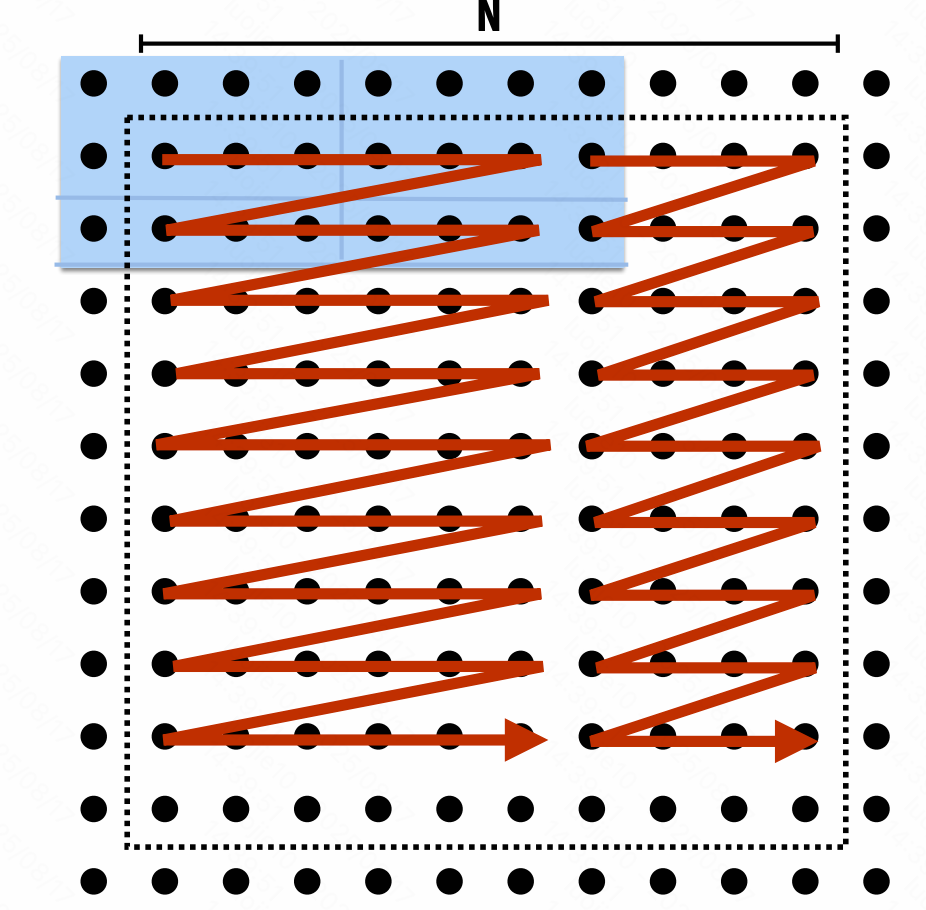
改变网格遍历顺序
「块状 blocked」遍历顺序 cache
「融合 fusing」循环
提升计算强度 arithmetic intensity
load / store per arithmetic
(存在功能模块化、代码可读性等的取舍)
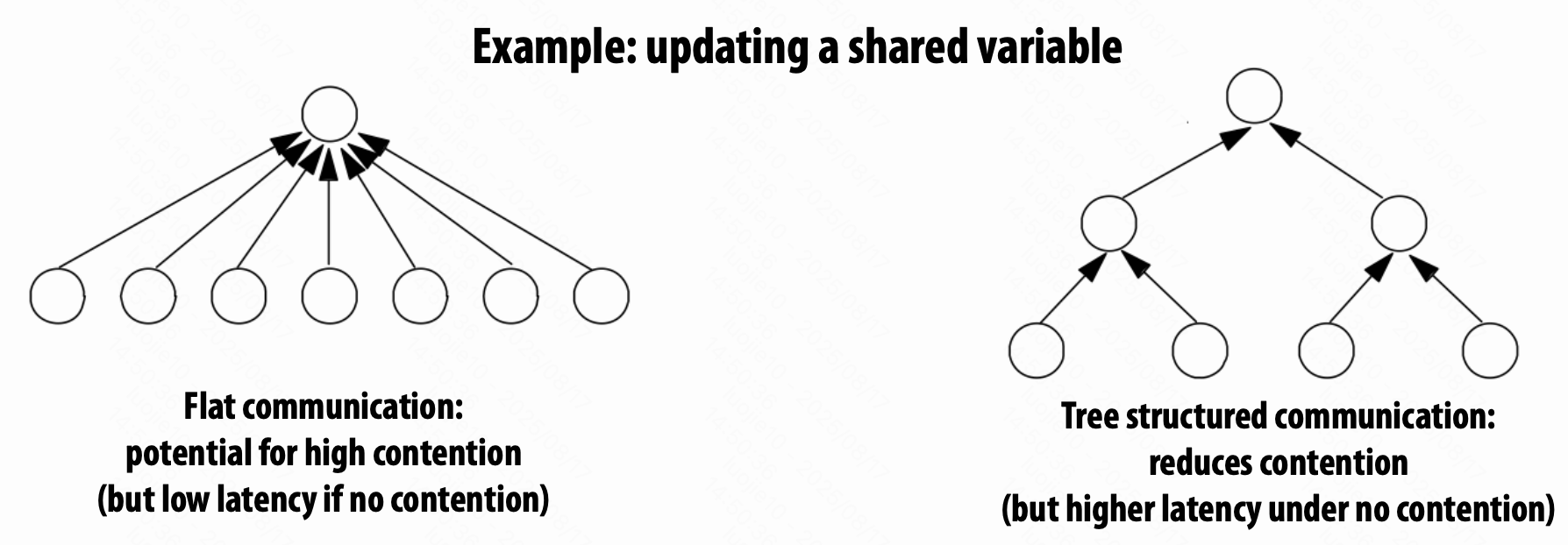
Contention 竞争
使用树状结构来减少竞争。
总结
减少通信开销
发更少、更大的消息(均摊开销),具体地,合并小消息成大消息
降低通信延迟
重构代码来利用局部性,硬件上提升通信架构
降低竞争
复制被竞争的资源(本地副本、细粒度锁),错开访问
提升通信/计算重叠
异步通信,硬件上流水线、多线程、预抓取、乱序执行,并发性大于执行单元数量
总是从最简单的并行实现开始,再去测量你所达到的性能。
性能分析策略
确认你的性能是被计算、内存带宽、内存延迟、同步限制了?
“high watermarks”:实际上你最好能做到多少,距离最好的情况差多少?
Roofline model
屋顶线模型 - X-axis 计算强度、Y-axis 最大可获得的指令吞吐量
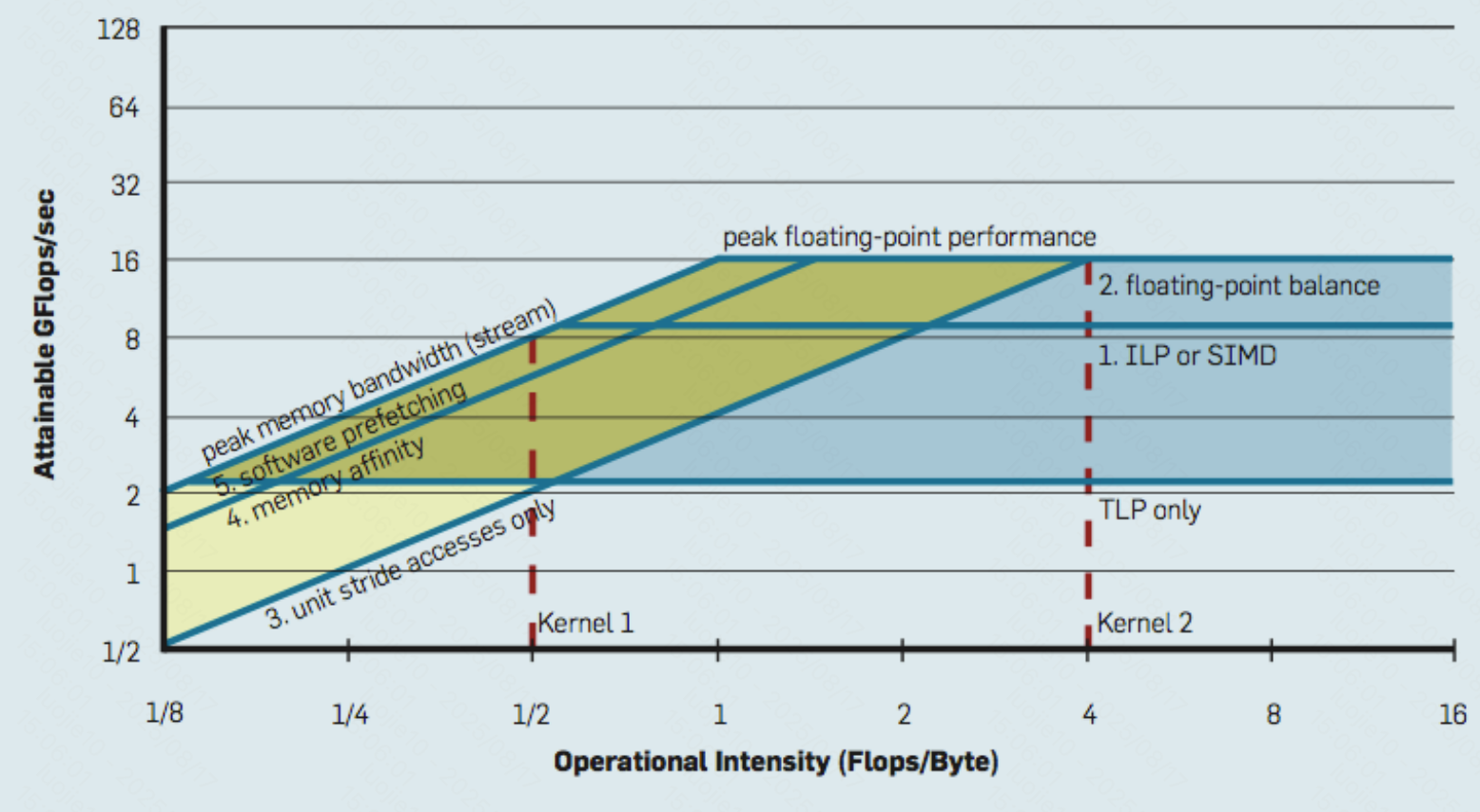
建立 high watermarks
增加不涉及内存的命令
如果执行时间线性增长,代码瓶颈是指令速率。
去除大部分计算,读取相同的数据
执行时间如果没有降低多少,则可能是内存瓶颈。
把所有的数组访问变成 A[0]
变快很多的话,考虑提高数据访问局部性。
去除所有原子操作 / 锁
如果快了很多(保持相同的工作量),瓶颈在同步开销。
使用 profilers / performance monitoring 工具
如 instructions completed, clock ticks, L2/L3 cache hits/misses, bytes read from memory controller, etc.
| |
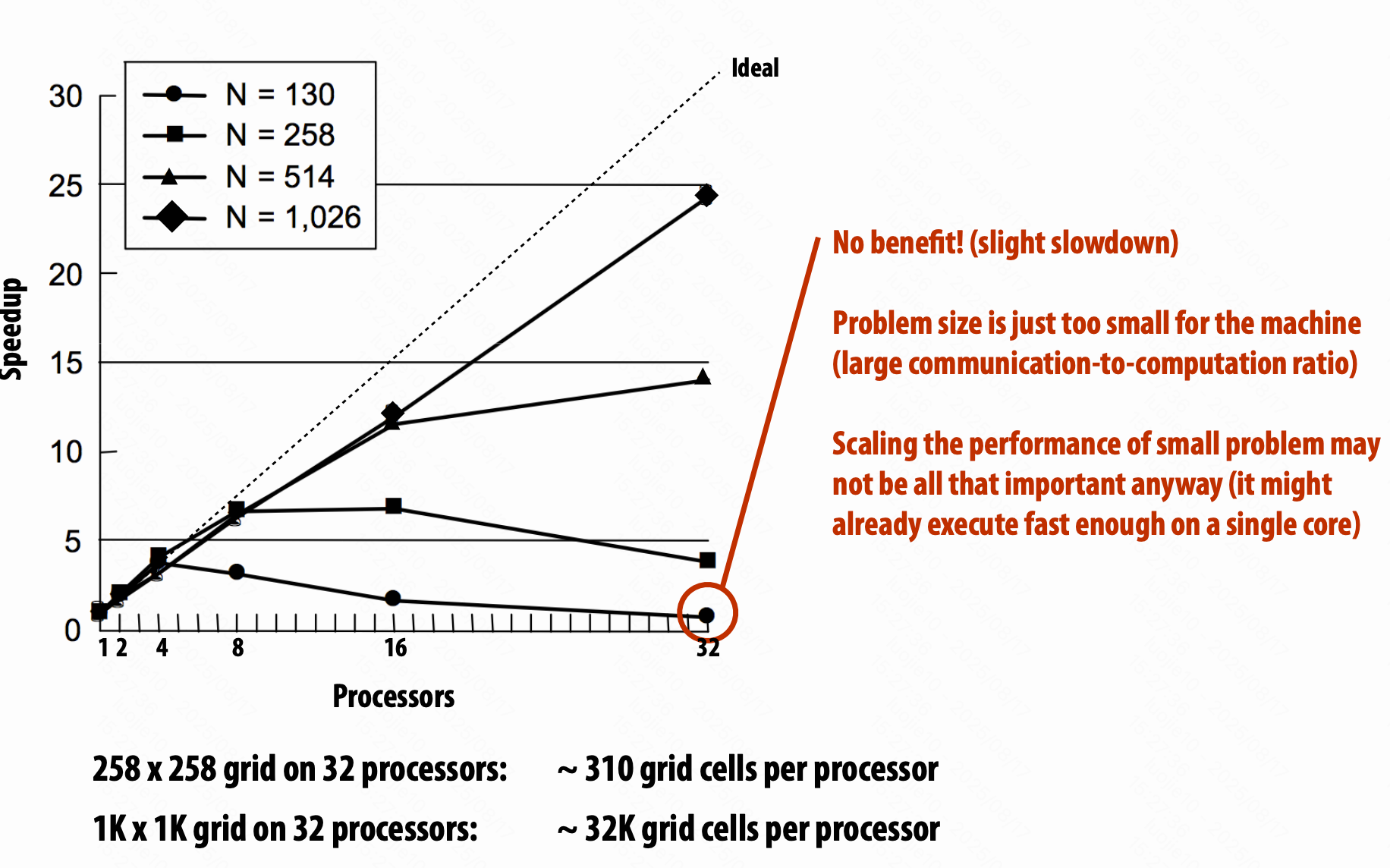
理解任务规模问题
绝对表现(时间、每秒操作数),加速比、高效(每面积、钱、瓦)
陷阱:固定任务规模的加速比
不同规模,相同算法的表现不同。
(如前面的 2D 分配方式,在 N 小 P 大的时候,反而可能不如原本最差的版本)
超线性的加速比(对 cache 合适的配置)
所以,不同任务规模、不同并行规模在不同任务上有很大的不同。
load balance, overhead, arithmetic intensity, locality of data access
只用固定的任务大小来测试一台机器的方法是很有问题的。
过小的任务,并行开销大于并行好处;
未能充分利用大机器的优势。
General program optimization tips
- Measure, measure, measure… 测量评估
- Establish high watermarks 找到瓶颈
- 意识到规模问题,任务是不是很好的匹配机器了?
GPU Architecture and CUDA Programming
Graphics 101 + GPU history (for fun)
为了更好的渲染图形。
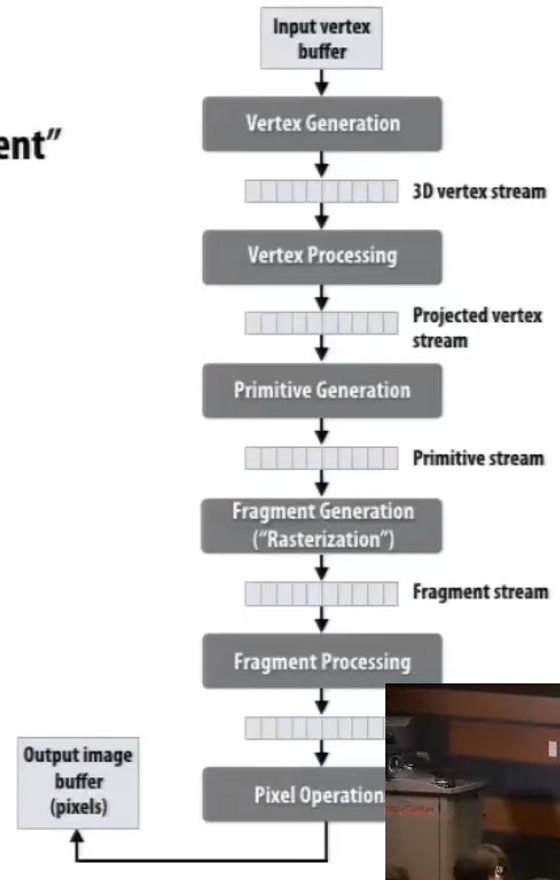
图形学的关键要素:顶点,基础图形(如线、三角形),片段,像素。
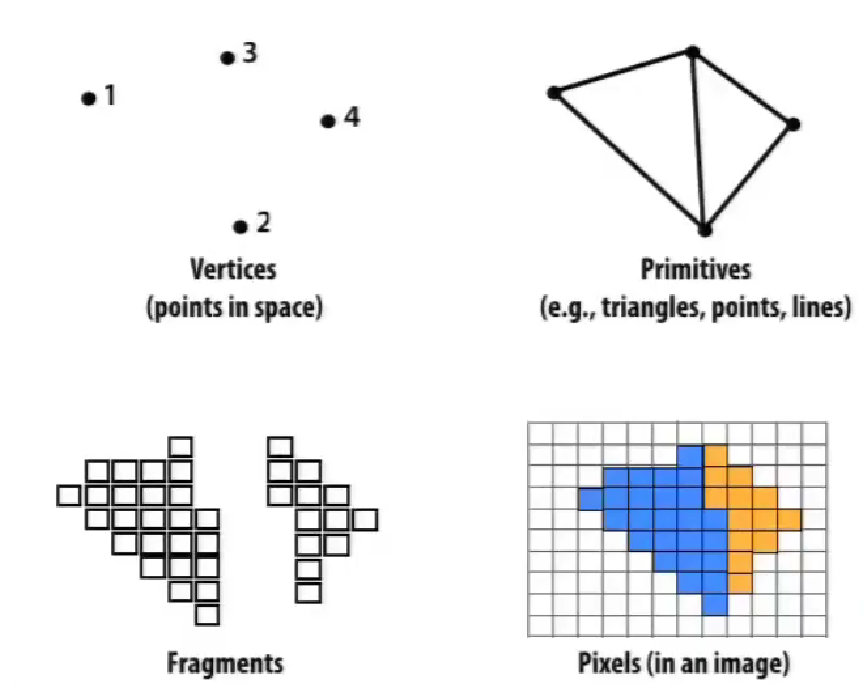
- 输入一系列三维顶点;
- 计算在二维屏幕的位置;
- 生成基础图形集合;
- 分割成片段,变成新的二维顶点集合;
- 计算颜色。
OpenGL API,调整材质的光泽等等。
graphics shading language
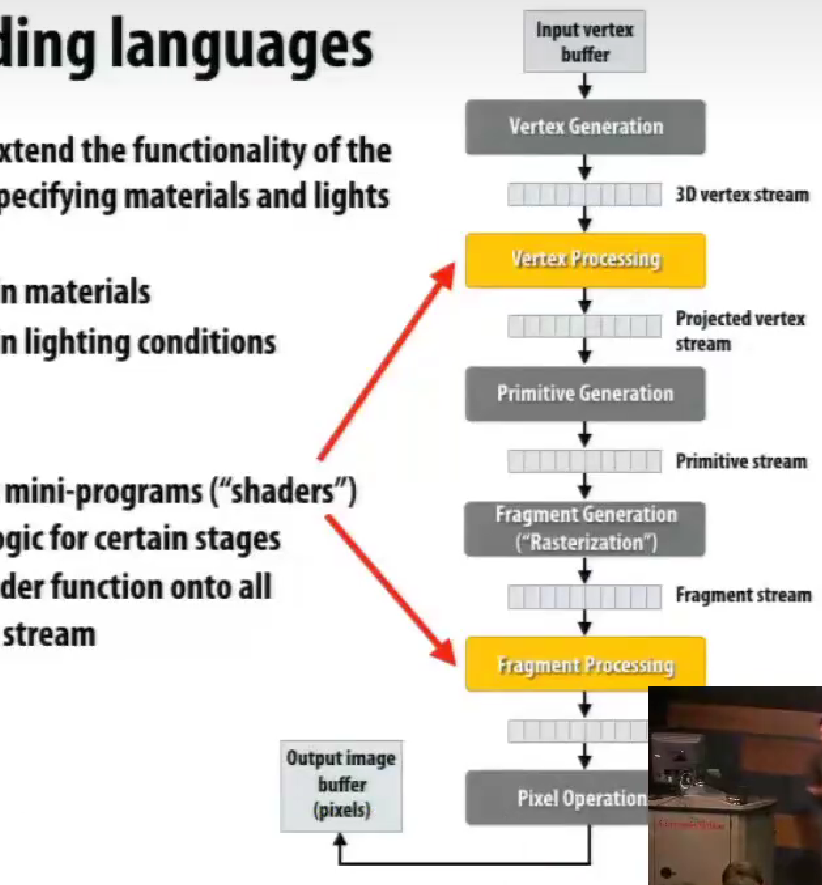
(粗糙的hack使用)
GPU-based 的科学计算
由于 CPU 的速度发展相对缓慢,开始把图形处理器用于科学计算。
GPGPU 通用图形处理器 2002-2003
(编译器)
Brook stream 编程语言 2004
编译成 OpenGL 命令。
GPU ccompute mode
不需要看作图形操作流水线的设备,而是作为大型数据并行的处理器。
在 2007 年之前,只能进行特殊的 ISA 操作。
NVIDIA Tesla with CUDA 架构 2007
硬件上实现了数据并行
由最初开发 Brook 编译器的 PhD 移植到了 GPU 上。
“C-like” 语言,相对底层。
OpenCL 是 CUDA 的开放标准版本。
CUDA 只能在 NVIDIA GPU 上,OpenCL 可以在 CPU / GPU。
CUDA program
特别的 Thread 含义在 CUDA 编程语言的体系中,就如同 Program Instance 在 ISPC 的体系中的特殊语义,不等同 pThread 在 CPU 上。
层次化的并发线程集合模型。
二、三维,有出于一维确定各个维度,除法的开销大的考虑。
线程的调度在硬件集成。
warp,线程束(CPU 类比 32-SIMD,GPU 32 独立执行上下文共享一条指令)
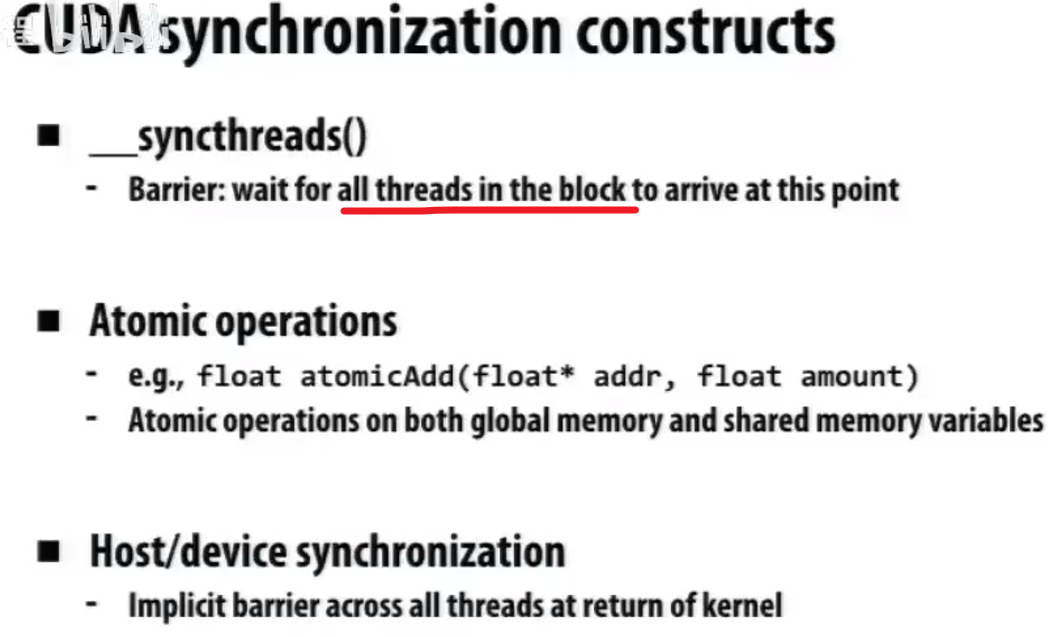
如果要求的线程数,超过了总可能的块内的线程数,无法编译,因为 __syncthreads()会形成死锁,等待。
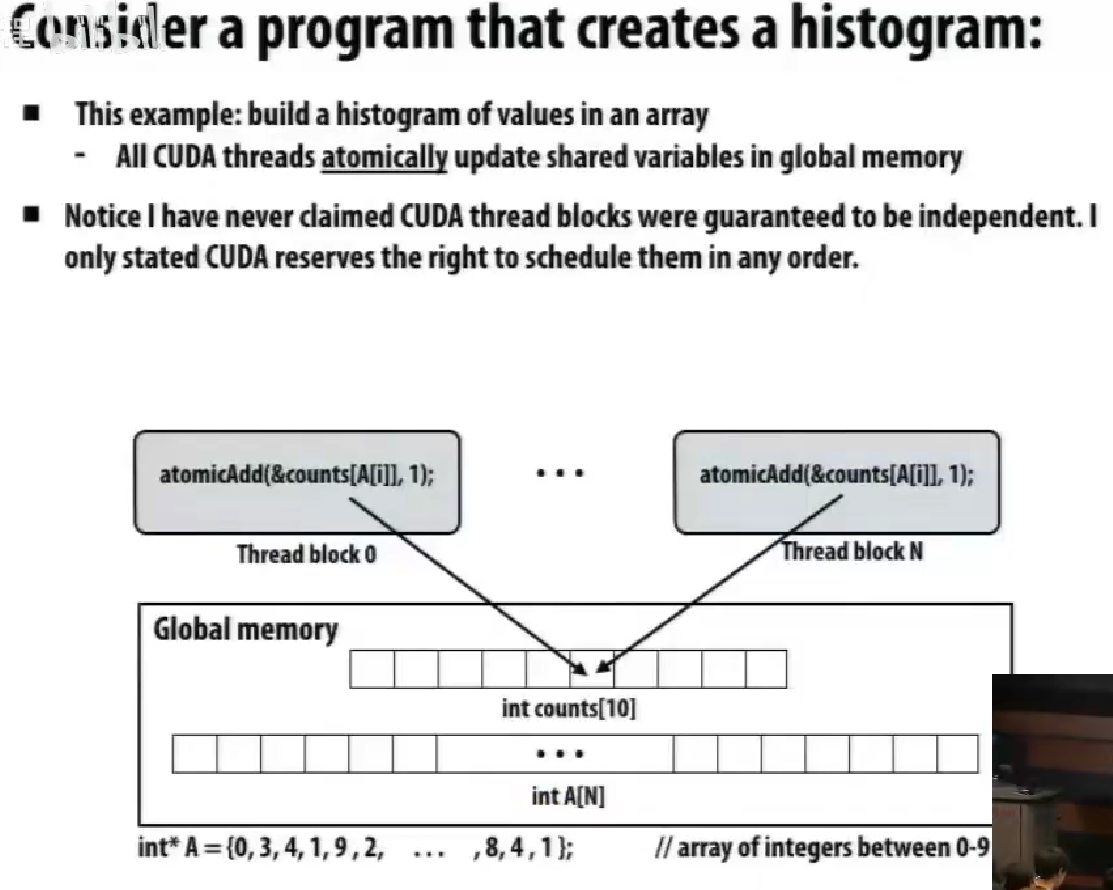
创建直方图,不同块要访问同一个内存地址。
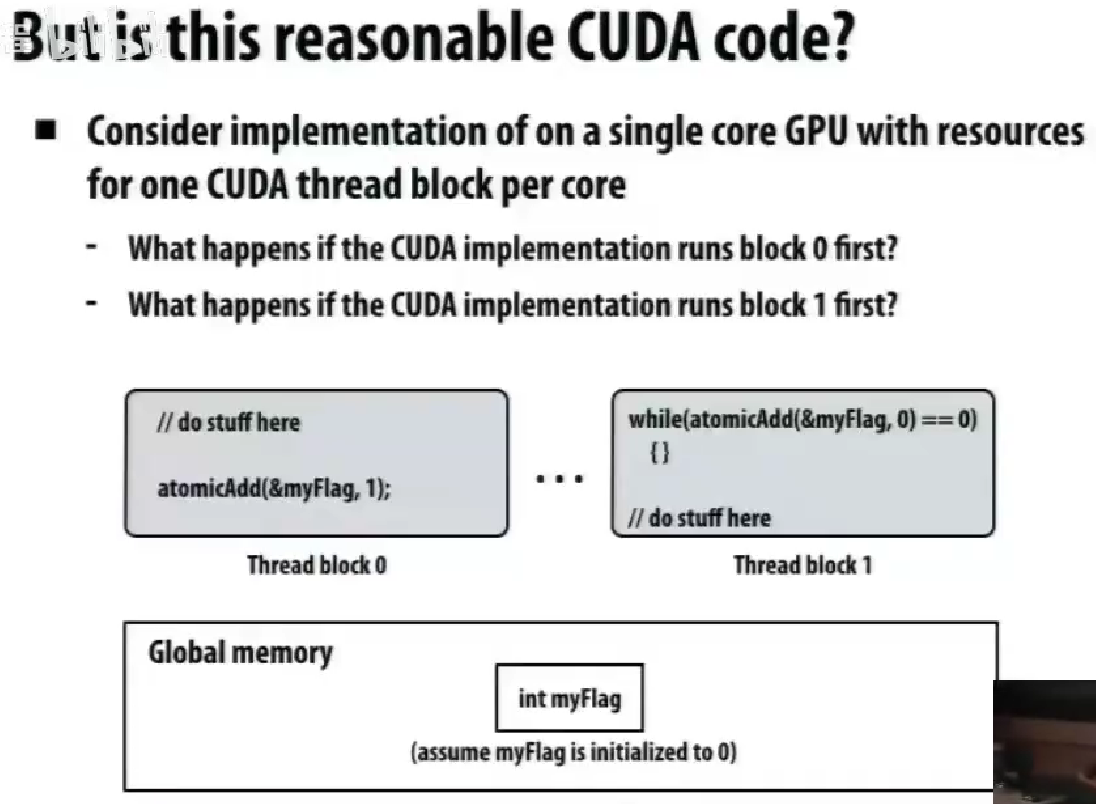
哪个是有效的代码。
Data-Parallel Thinking
对序列数据的操作。
Map 映射
逐一对 $seq_a$ 每一位应用 $func()$ 输出到等长的 $seq_b$。
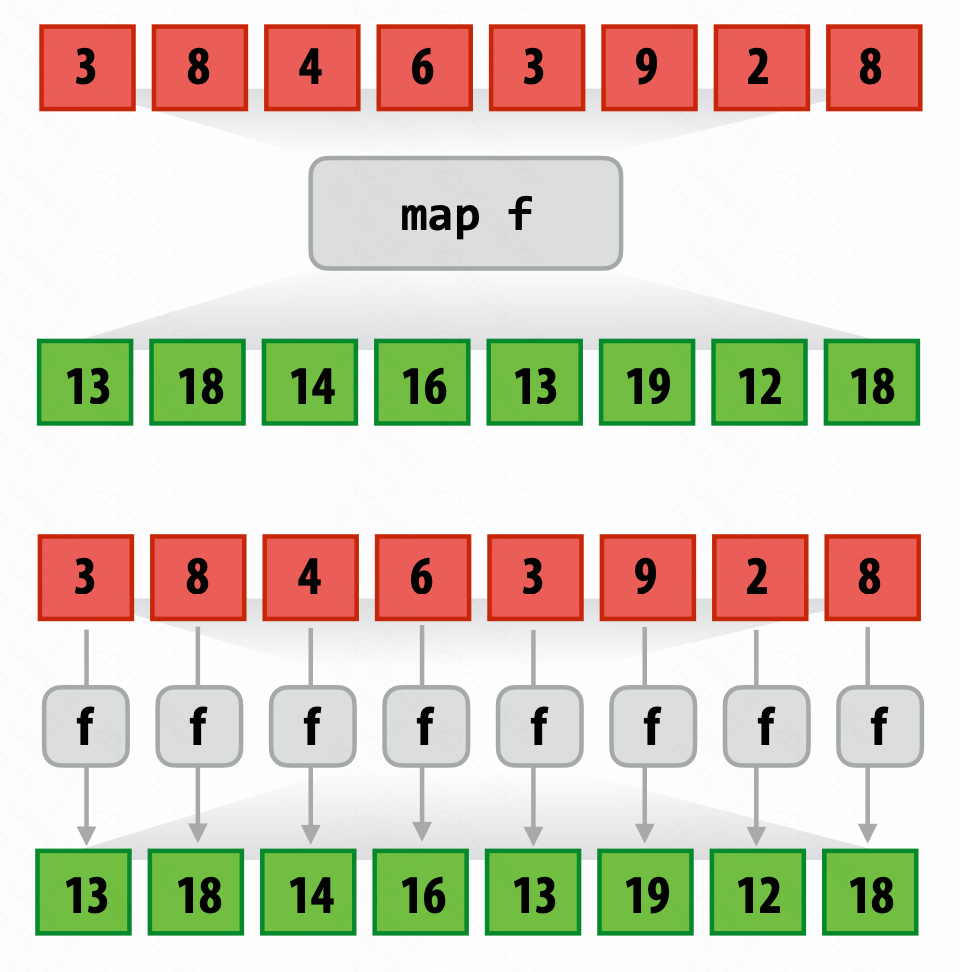
Parallelizing map
以任意顺序应用,相互之间没有依赖。
Fold 归约(fold left,从左到右)
将二元操作依次应用。
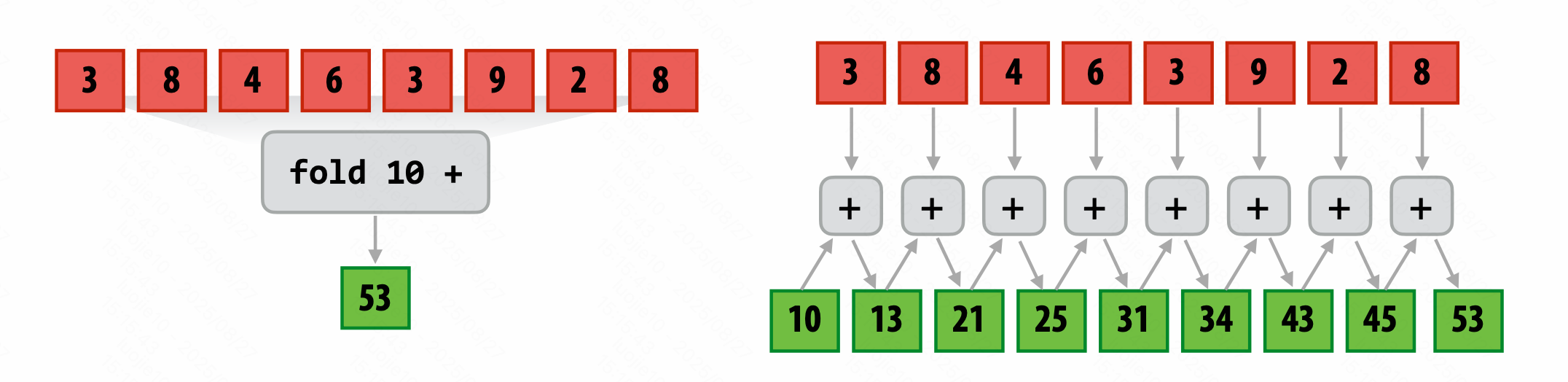
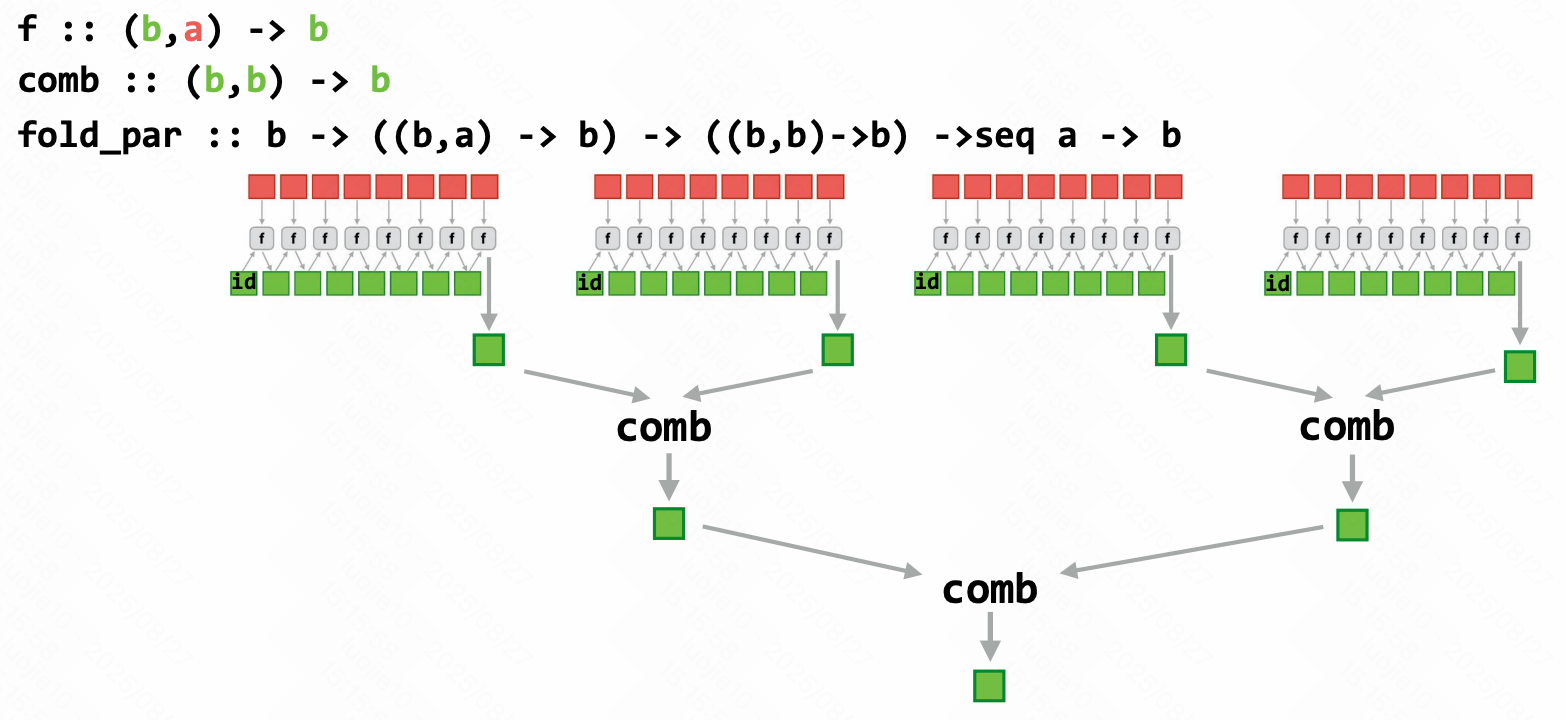
Parallel fold
无关运算合并先后的。
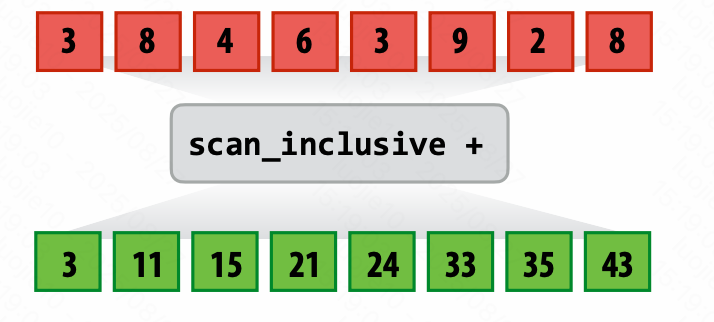
Scan 扫描
scan inclusive
做前缀(二元操作),包含自己。
scan exclusive
做前缀(二元操作),不包含自己。
Parallel Scan
无关运算合并先后的。
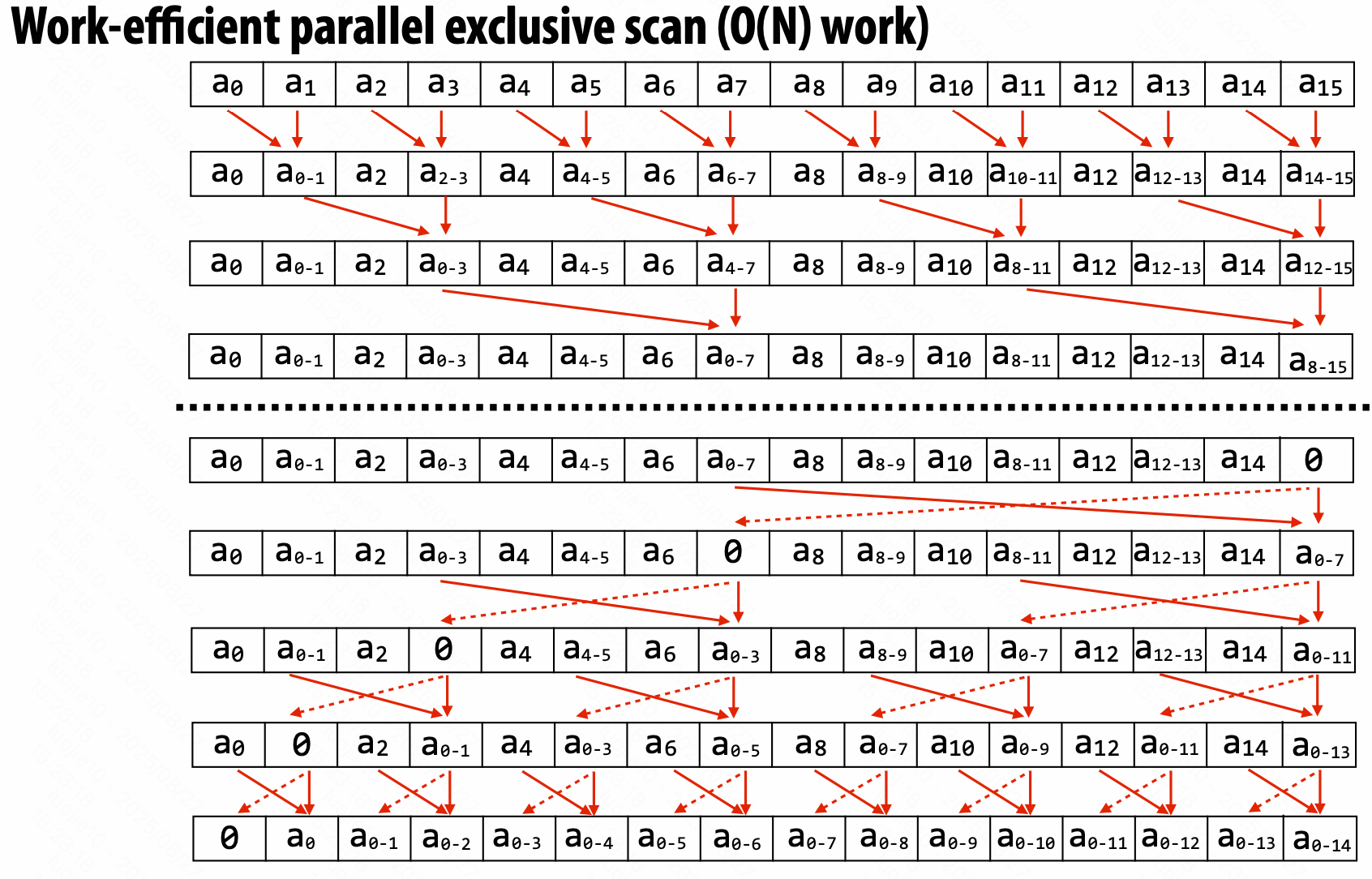
伪代码:
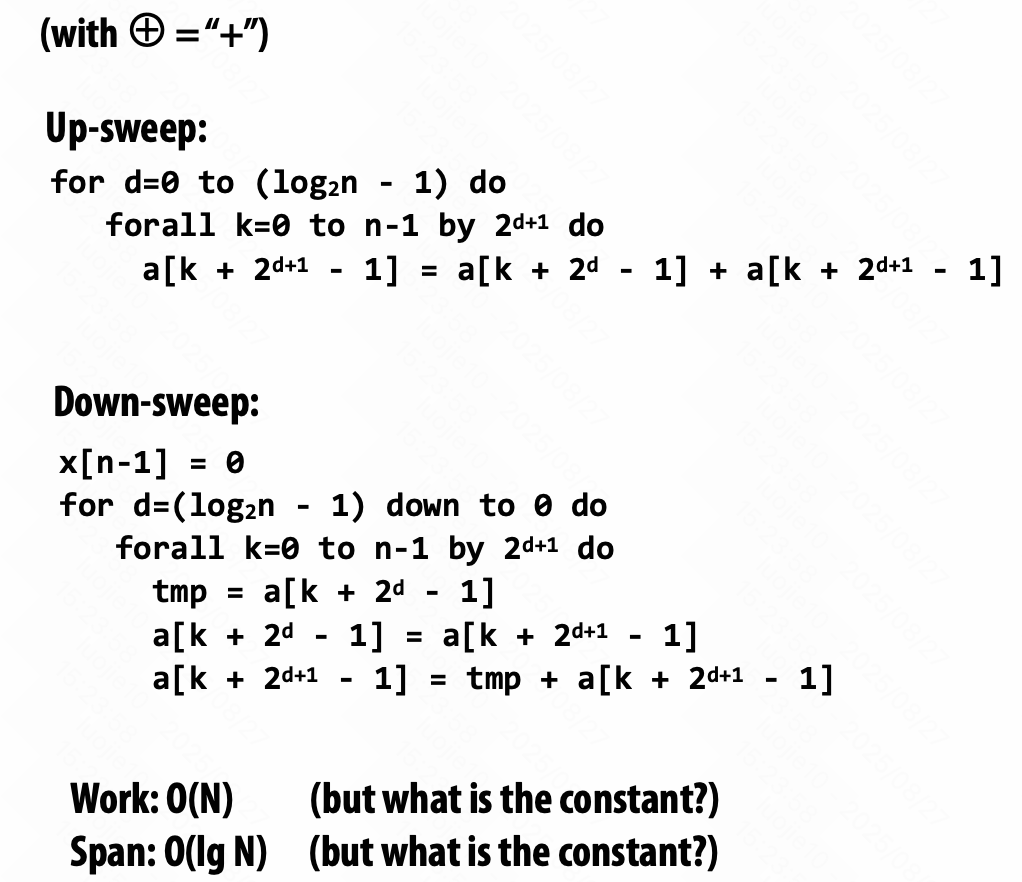
多个小块内部处理,再根据块 base 重建。
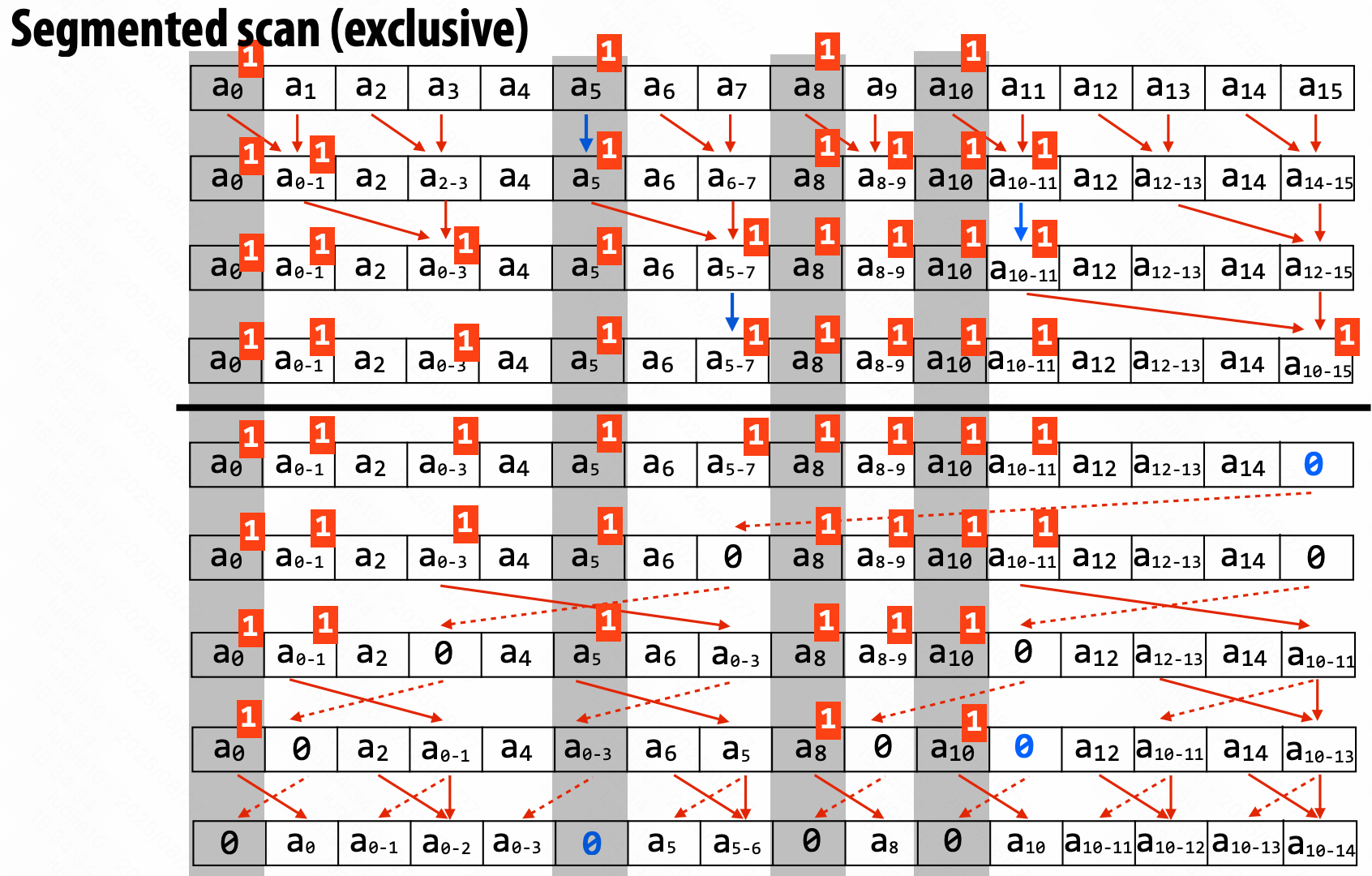
Parallel Segmented Scan
操作序列的序列。
[seq1, seq2, seq3]
同时传入长短不定的序列,都需要操作,比如 scan_exclusive。
如果不统一调度处理,很容易出现负载不均衡的情况。
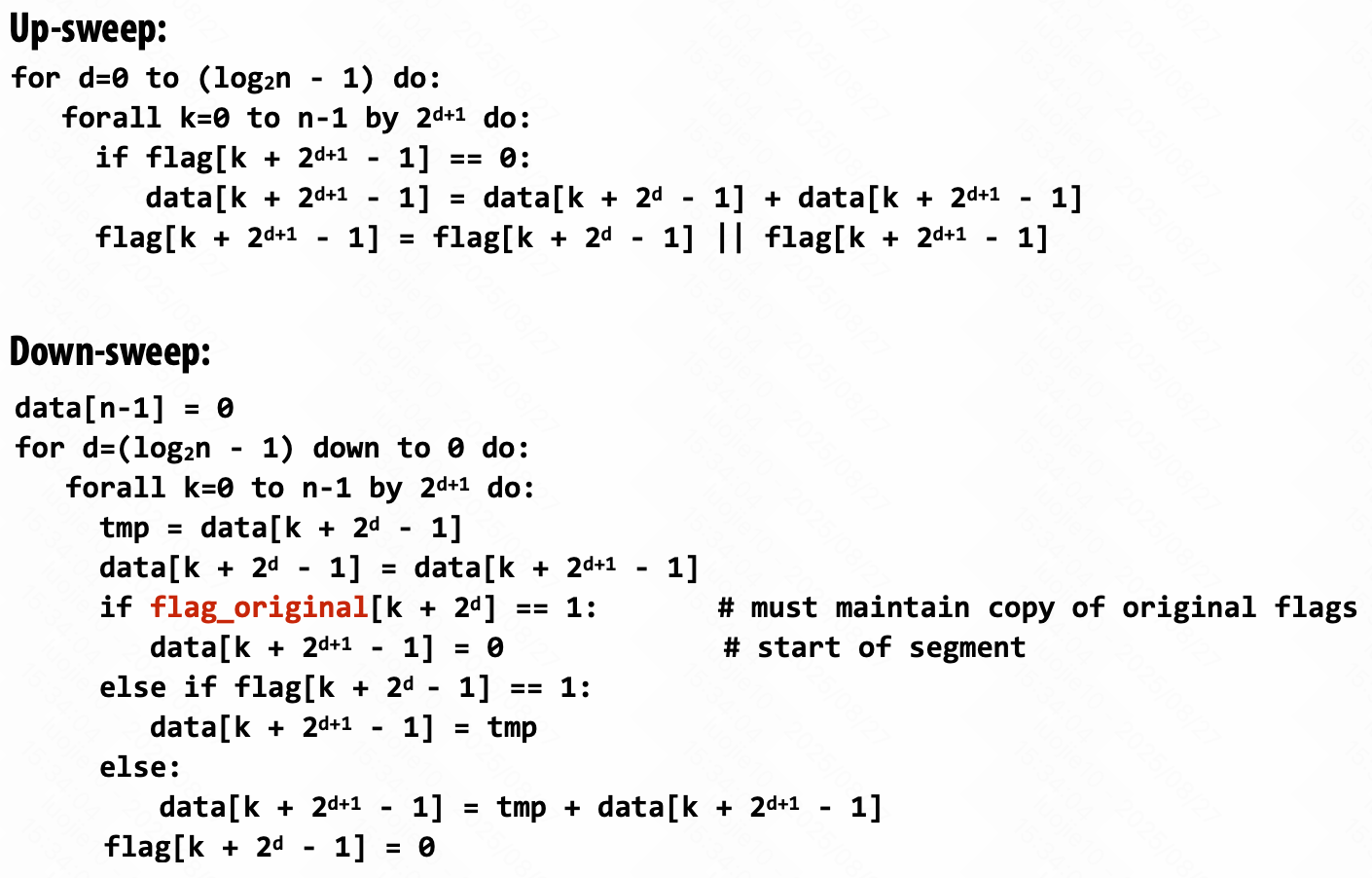
增加开始标志 “start-flag”。
示意图:
伪代码:
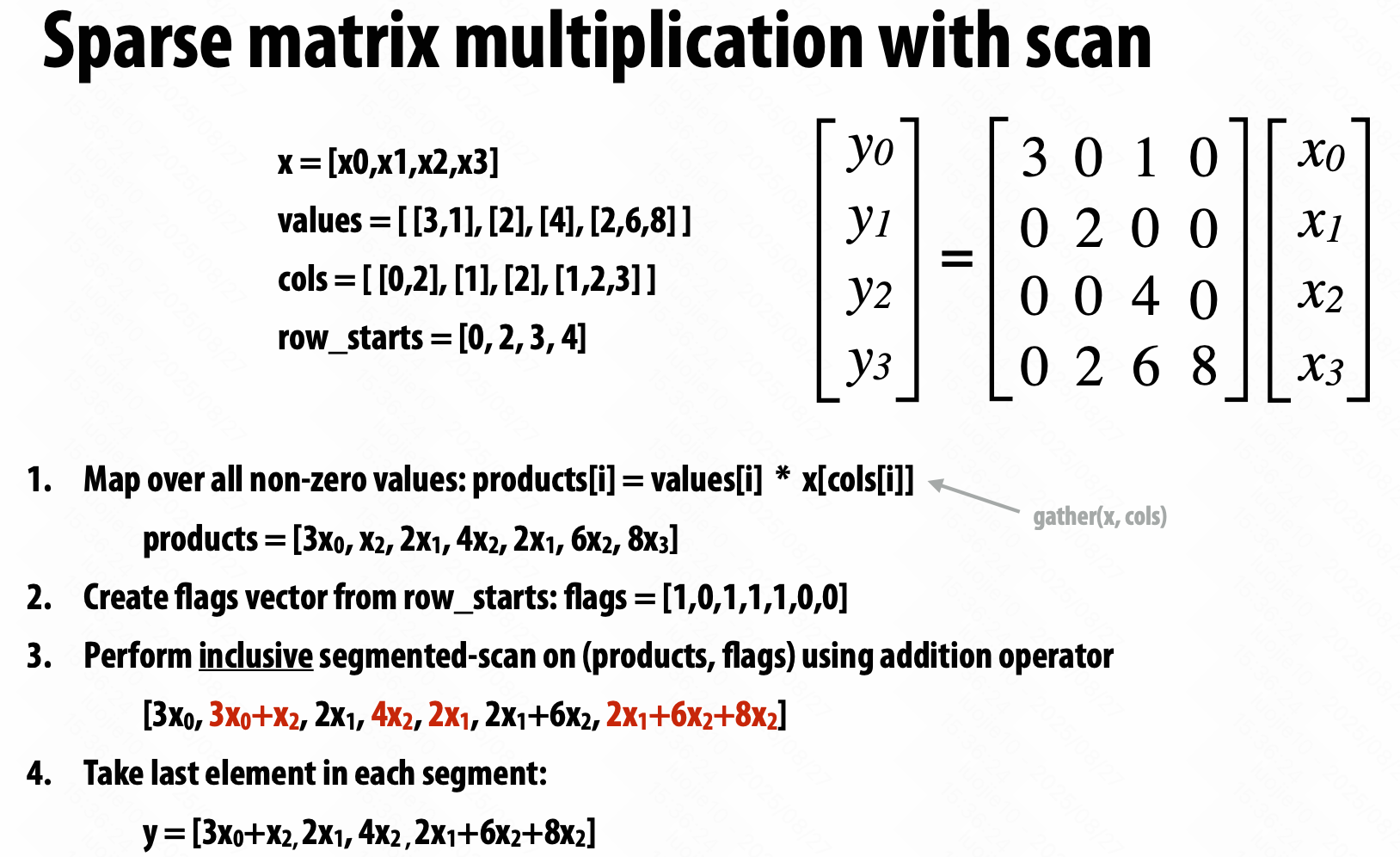
应用场景:
稀疏矩阵乘法
Gather / scatter 聚集 / 分发
gather(index, input, output)
output[i] = input[index[i]]
scatter(index, input, output)
output[index[i]] = input[i]
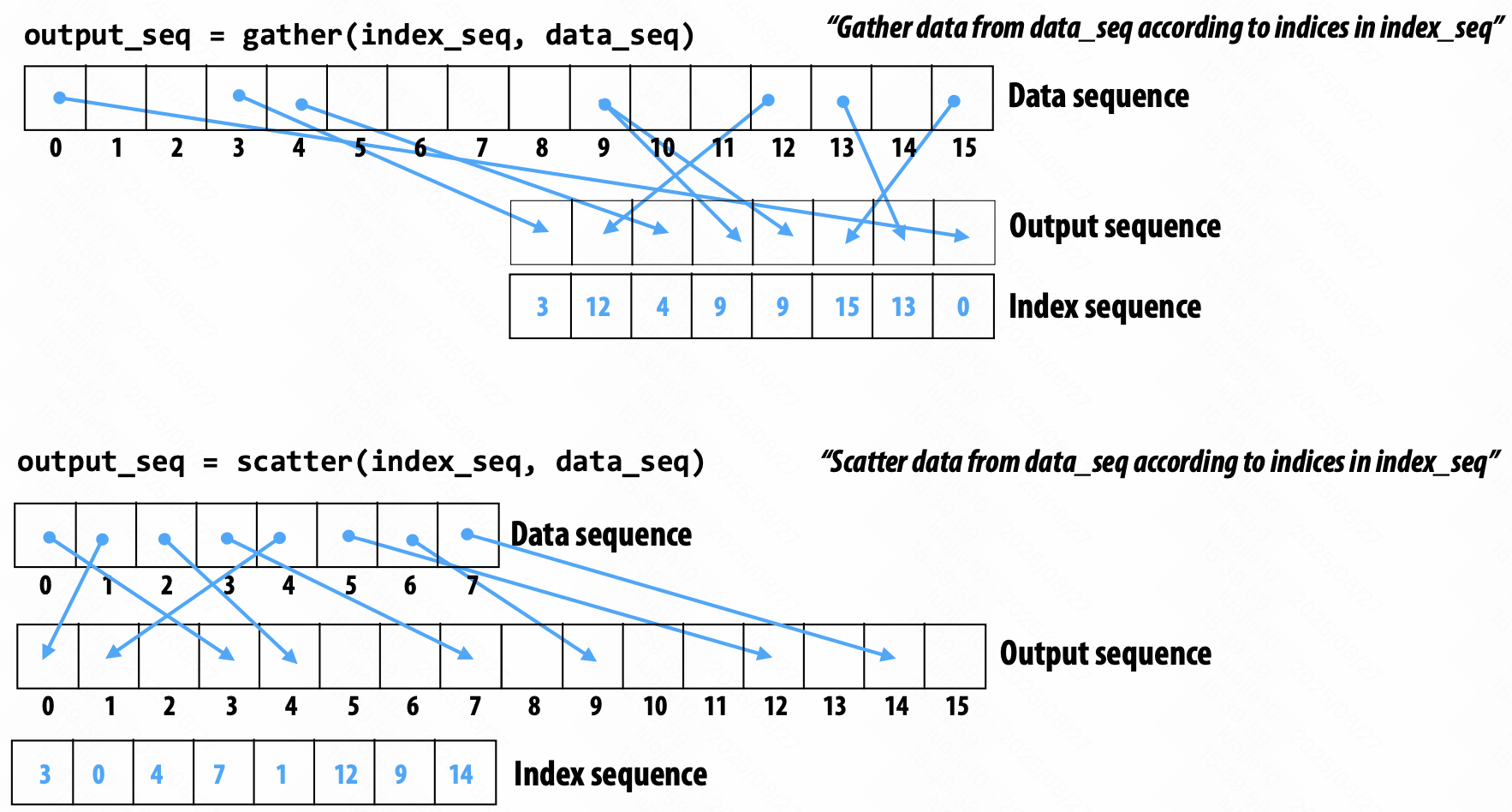
在某些条件下,可以把 Scatter 转化为 Gather
假设索引中的元素是唯一的,并且索引中的所有元素都被引用(scatter = sort + gather)。
如果上面的条件不满足的时候(scatter = sort + map + gather)。
这种多个的组合在 find_repeats 中也能见到。
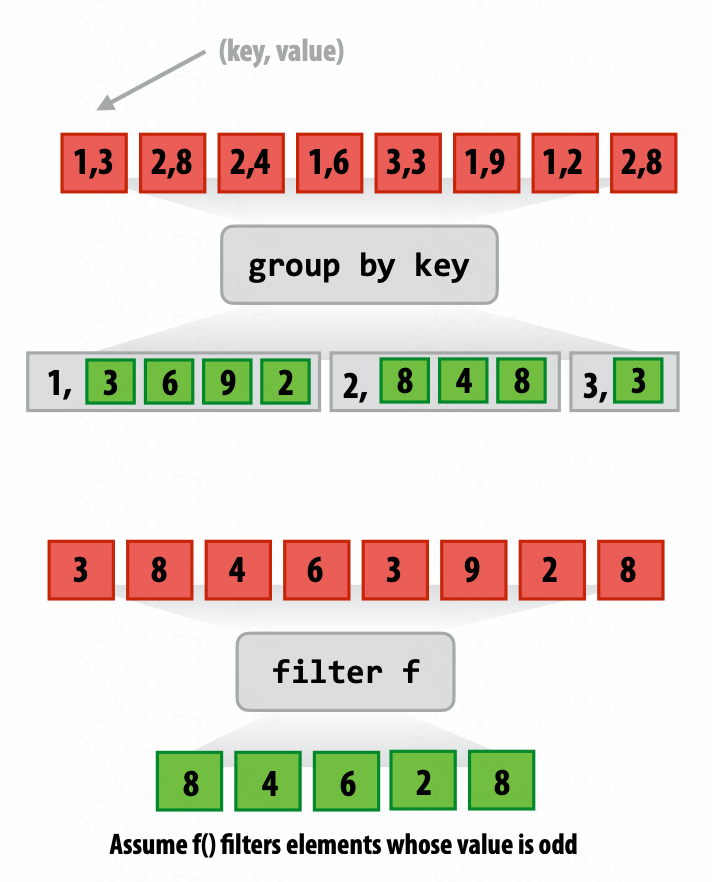
更多序列操作
- Group by key
- Filter
- Sort
应用场景:
- N 体问题
- 并行直方图
CUDA 中的一个高效并行算法库:Thrust
Distributed Data-Parallel Computing Using Spark
集群 Cluster 上的数据并行。
- Scalable,可规模化
- Fault-tolerant,容错
- Efficient,高效
$\text{System MTTF (Mean Time to Failure)} = \frac{1}{\sum_{i=1}^{n}{\frac{1}{\text{MTTF}_i}}}$
Storage System 存储系统
如果节点 node 出现故障,如何持久地存储数据?
Distributed File System 分布式文件系统
提供全局文件命名空间 Global file namespace,如 Google GFS, Hadoop HDFS。
典型使用模式
- 超大文件
- 数据很少就地更新
- 读取 read 和 附加 append 是最常见的,如 log 日志。
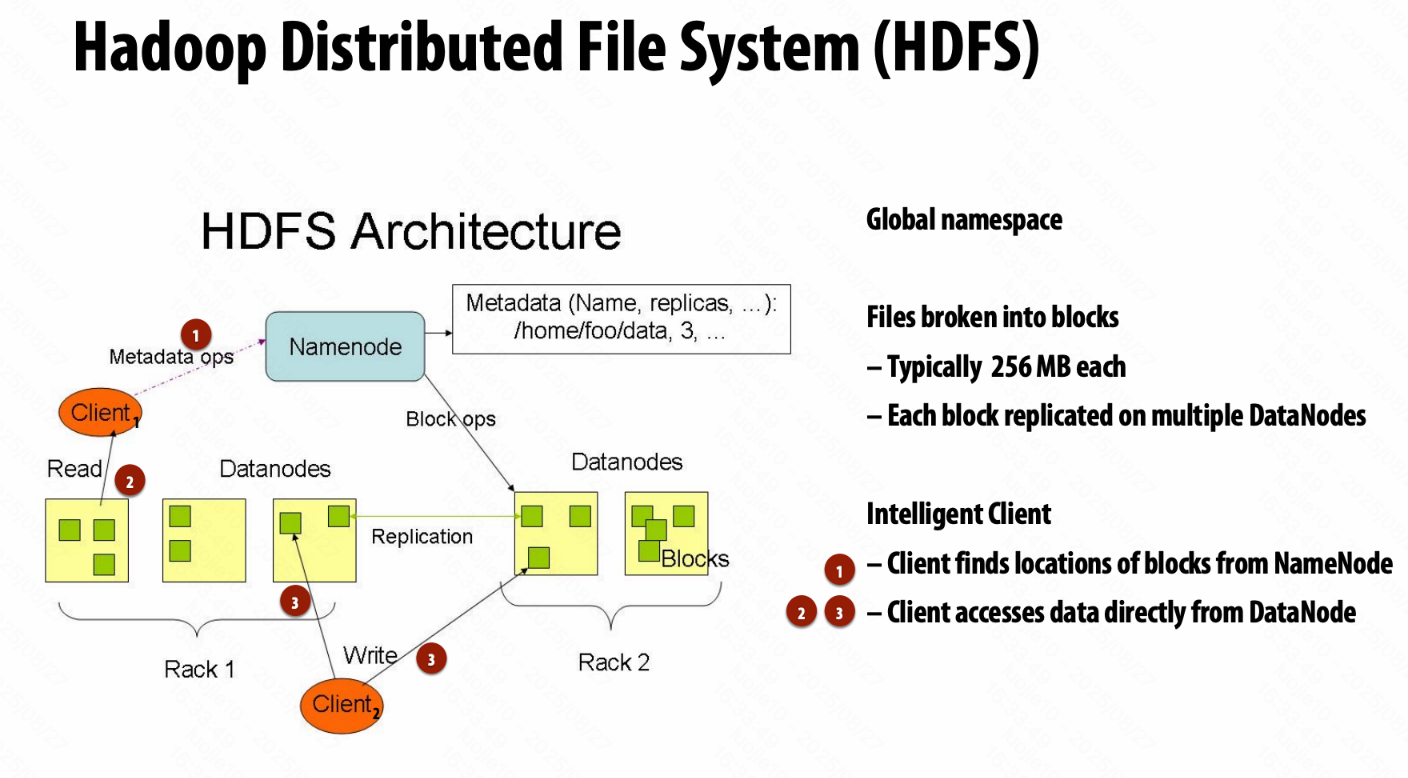
Distributed File System (GFS)
块服务器 chunk server
- HDFS 中的 DataNodes
- 文件被切分成连续块(常常 64 - 256 MB)
- 每个块都有副本(常常 2 - 3 份)
- 尽量把不同副本放入不同机架
主节点 master node
- HDFS 中的 NameNode
- 存储元数据;常常被复制副本
客户端的文件访问库
- 让主节点找到块(数据)服务器
- 和块服务器直连获取数据
Hadoop Distributed File System (HDFS)
Message Passing Interface (MPI),实现 Message Passing 模型的接口。
MapReduce
map + reduce (fold) => MapReduce
作业调度的合理性
利用数据局部性,“move coputation to the data”
mapper 作业在包含输入块的节点上运行
reducer 作业在已经有某字段最多数据的节点上运行
解决节点故障
调度器检测作业故障并在新机器上重新运行作业。
因为输入是持久存储的。(分布式文件系统)
调度器在多个机器上复制任务。(降低处理故障产生的开销)
解决慢机器
调度器复制作业到多台机器上。
MapReduce 好处
提供了数据并行的模型,简化了集群编程。
- 将作业自动划分为 map 和 reduce 任务
- 局部感知调度
- 负载均衡
- 故障恢复、慢机器适应
问题
- 只支持简单的 map, reduce 编程结构
- 迭代算法每一次都要从硬盘中读数据
用户需要更复杂、多阶段的应用。
Apache Spark
in-memory, fault-tolerant distributed computing
重用中间数据集的集群规模计算的编程模型。
不把中间数据写回持久分布式文件系统(不高效)
in-memory calculation,容错怎么保证?
复制所有计算
成本高,降低峰值吞吐
检查点 Checkpoint 和回滚 rollback
定期存储到持久分布式文件系统
故障后从上一个检查点开始
维护日志 log 更新
MapReduce
- 在每步 map, reduce 后,都会建立 checkpoint
- 函数式结构允许只重启一个 map, reduce 任务,不需要整个程序重启
Resilient Distributed Dataset (RDD) 弹性分布式数据集
Spark 的重要编程抽象
- 只读记录有序集合(不可变)
- RDDs 只能在对持久存储 / 现存 RDDs 进行确定的转换 transformation 时被创建
- RDDs 的 Action 操作把数据返回给应用
一次性全读进来,并且在内存中存着,经过几个操作会比在硬盘中占的空间还大。
所以,考虑 loop fusion 和 “streaming”,流式处理,一次处理完一行数据。
能不能进行 fusing,需要看 Narrow dependencies / Wide dependencies (如 groupByKey),即是否不需要和别的节点通信。
使用 PartitionBy 可以控制划分的方法,在一些操作的使用上达到 Narrow dependencies 的效果。
通过血缘谱系 Lineage 来实现弹性 Resilience,运行时系统可以通过 Lineage 重建 RDD 的内容。
Lineage 是 Transformation 的 log,粗粒度,存储高效。
_.persist(RELIABLE) 允许让在长 Lineage 中,设置 checkpoint。
规模化不是终点,COST = “Configuration that Outperforms a Single Thread”。
不仅追求规模化,更要有比单线程更好的效果,即也追求高性能。
Efficiently Evaluating DNNs (Software Solutions)
没太多新东西,特别是先做 PA 回头来看的话。
提到的一些优化方式,神经网络结构优化、算子优化(分块、融合)、压缩模型(低精度、稀疏化、剪枝)。
GPU 为什么是 DNN 的好平台?高计算强度、算力高、高性能库多。
GPU 为什么可能是次优的 DNN 平台?通用部分可能没那么需要。
Hardware Specialization
功耗限制型计算
专用硬件,追求更好的能耗比。
ASIC (Application-Specific Integrated Circuit)
FPGAs (Field Programmable Gate Arrays), Verilog
DSP (Digital Signal Processor)
介绍了一些专用硬件。
降低功耗:专用的处理单元、减少数据移动。
适当考虑重算,多考虑整数运算。
DRAM 的工作逻辑
[ Precharge (PRE, 用于传输的 bit line) + row activate (RAS, 待读取行) ] + column access (CAS)
data pins 利用率低,一个 DRAM 多个 bank 共享一个 data pins 流水线。
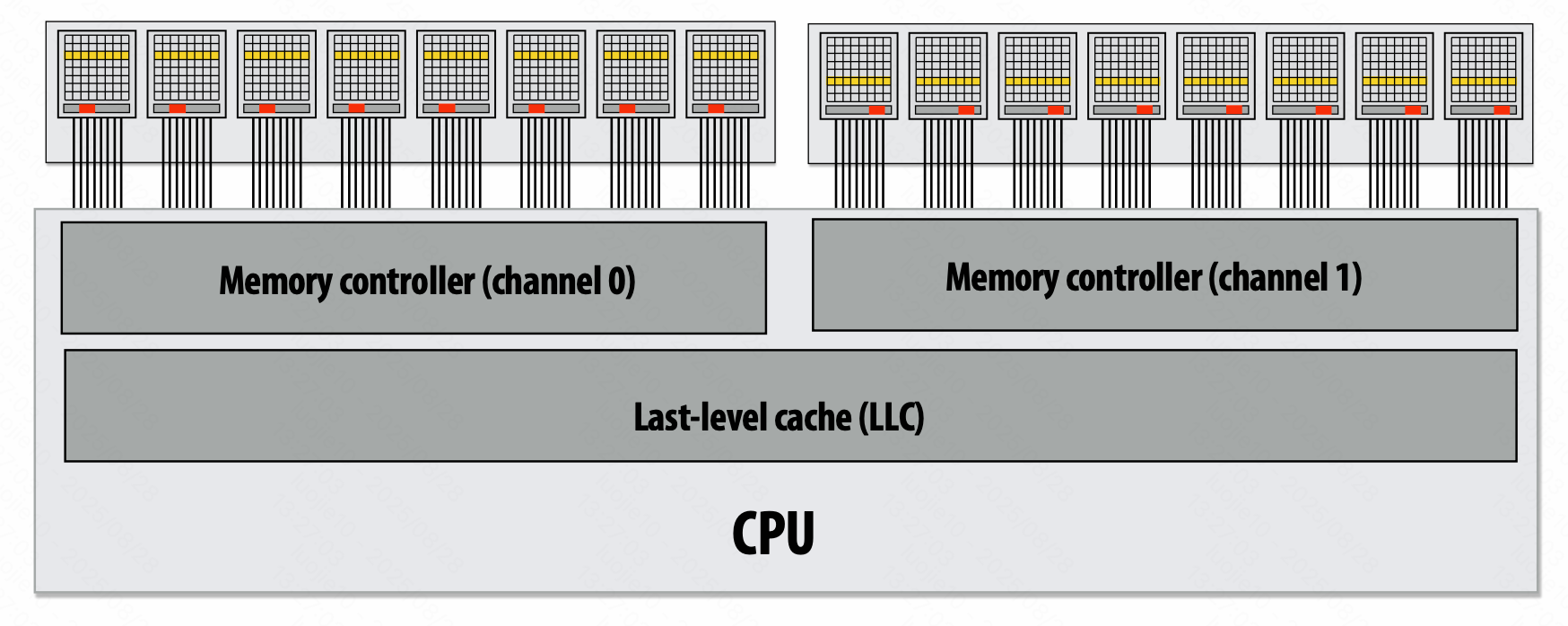
DIMM (Dual Inline Memory Module)
Dual-channel memory system 双通道内存
Simpler setup: use single controller to drive same command to multiple channels
DDR (double data rate)
HBM (High-bandwidth memory),高带宽,高能效,小体积。
内存瓶颈的解决方式:
应用工程师:编程局部性
硬件架构:DRAM 调度、距离更近、计算移到内存中、数据压缩。
Programming Specialized Hardware
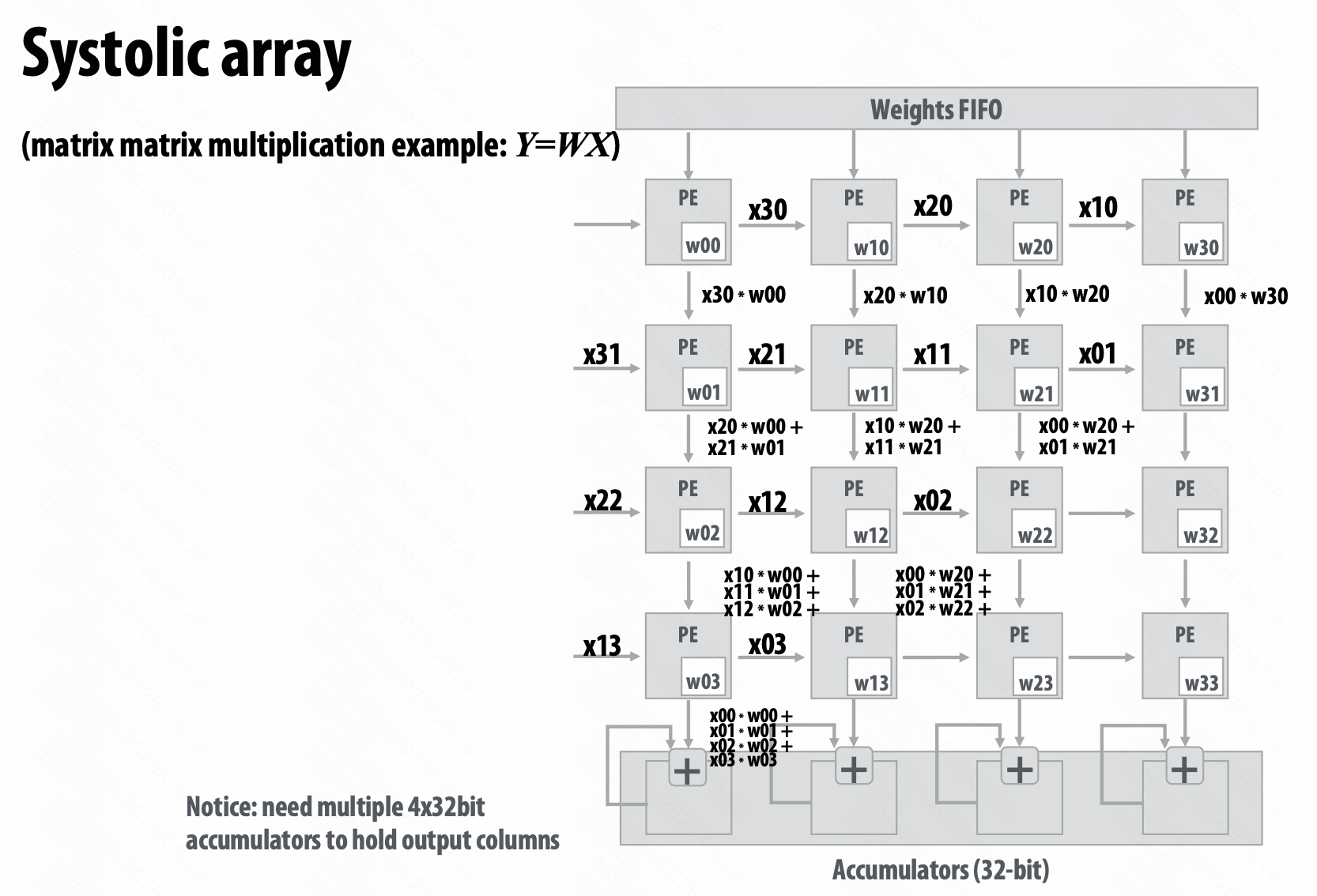
TPU - Systolic array 脉动阵列,很有节奏感了。
TMA (Tensor Memory Accelerator)
ThunderKittens, A Simple Embedded DSL for AI kernels
设计原则
- 16x16 Tile layouts
- 异步
- GPU 协调模式,生产者 - 消费者
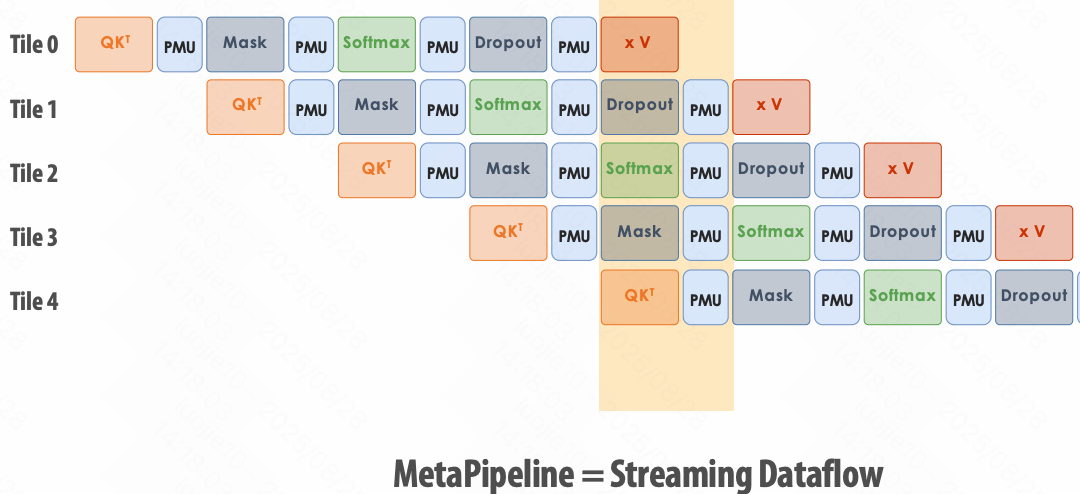
MetaPipeline = Streaming Dataflow
PCU: Pattern Compute Unit
PMU: Pattern Memory Unit
AGCU: Address Generator and Coalescing Unit
Programming Specialized Hardware II + Cache Coherence
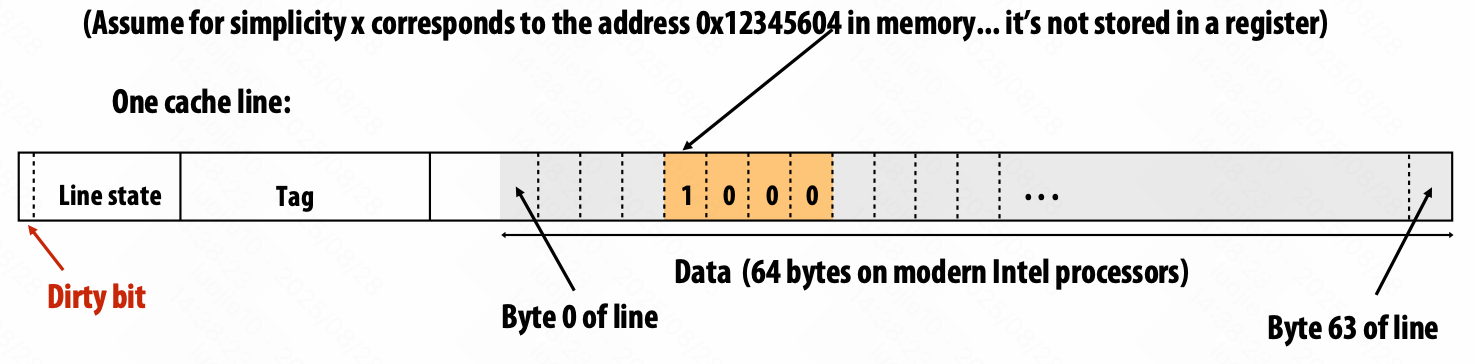
cache line
Write-Through(写通):
当应用程序执行写操作时,数据会同时写入缓存和主存储器。
数据一致性,但要写两次。
Write-Back(回写):
写操作仅更新缓存,并标记为“脏数据”。只有当缓存中的脏数据块即将被另一个缓存块替换时,才会被一次性写入主存储器。
数据不一致,数据丢失风险。
write-allocate,会先将数据块从主内存读取到缓存中再写入;
write-no-allocate,则直接将写入操作执行到主内存,不将数据加载到缓存。
缓存未命中 cache miss 的 3 C:cold, capacity, conflict。
缓存一致性 cache coherence,缓存 cache 和内存 main memory 之间的不同。
单写者-多读者不变量 Single-Writer, Multiple-Reader (SWMR) Invariant
shared cache,简单,但是在 cache 上竞争 contention
write-through 方法,简单,但是其他 local cache 都失效了
write-back 方法,当写入 cache 后缓存只是合法副本的缓存,变成独自 exclusive 的所有权,当别的处理器要读取这个数据时,它要送过去。
“modified” 状态,不需要通知别人,因为它肯定是不合法的。
由 cache controller 来控制。
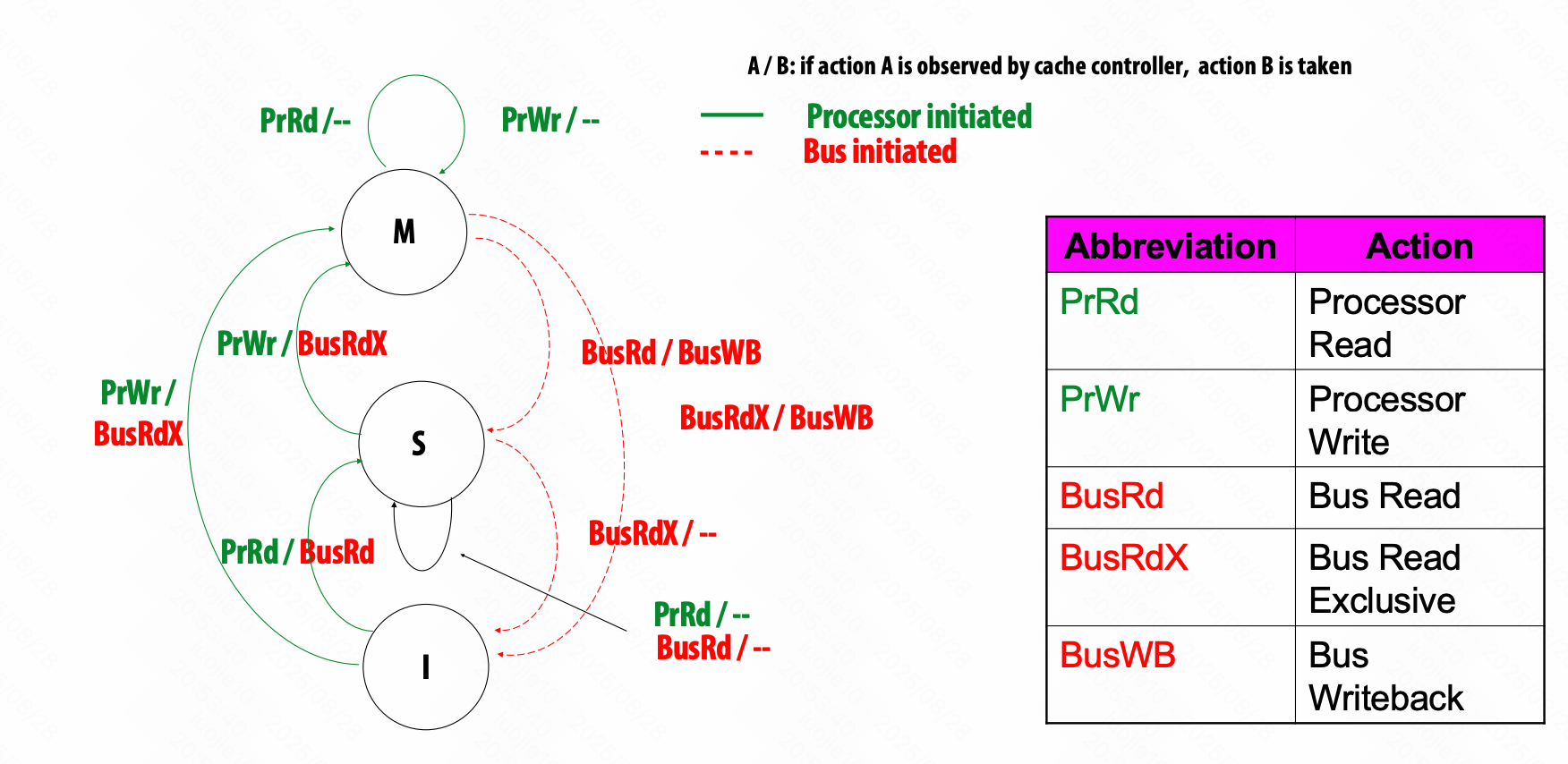
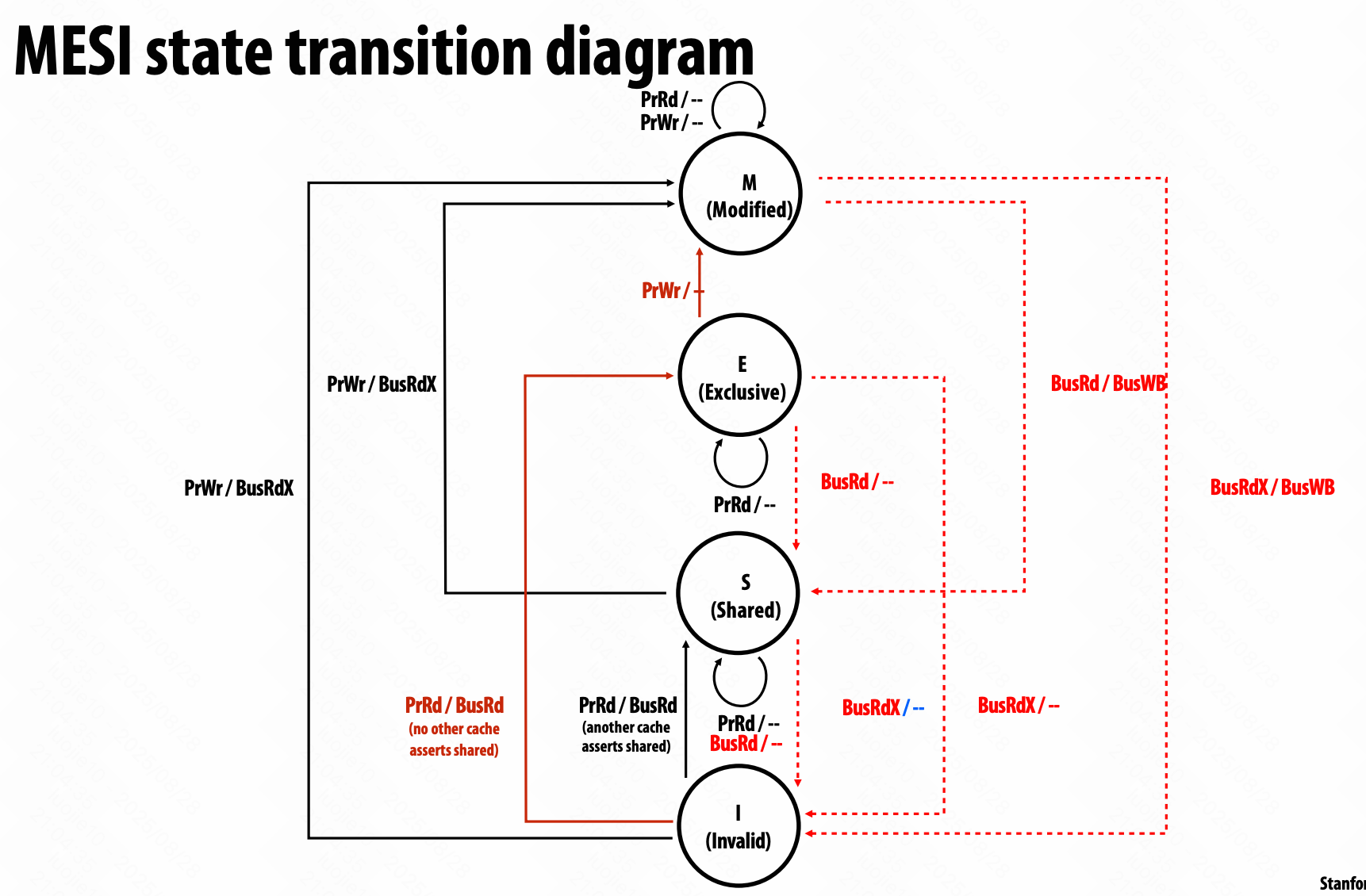
MSI write-back invalidation protocol
三种状态:
Modified (M): line valid in exactly one cache (a.k.a. “dirty” or “exclusive” state)
Shared (S): line valid in one or more caches, memory is up to date
Invalid (I): same as meaning of invalid in uniprocessor cache
PrRd (read)
PrWr (write)
BusRd: obtain copy of line with no intent to modify
BusRdX: obtain copy of line with intent to modify
BusWB: write dirty line out to memory
Obtain exclusive ownership before writing
BusRdX causes others to invalidate
If M in another cache, will cause writeback
BusRdX even if hit in S - promote to M (upgrade)
只能在 M 状态写入,需要告诉 cache controller,现在独占读入权,要写入,其他不能读。
MESI invalidation protocol
对于常见的读后写,需要两个转换,I ==BusRd=> S ==BusRdX=> M,在不共享的时候也存在。
增加 E (exclusive clean) ,独占权 exclusivity 和所有权 ownership 分离。(合法的副本)
广播 broadcast,不可规模化;
目录 directory,可规模化。
只是发送一致性信息。
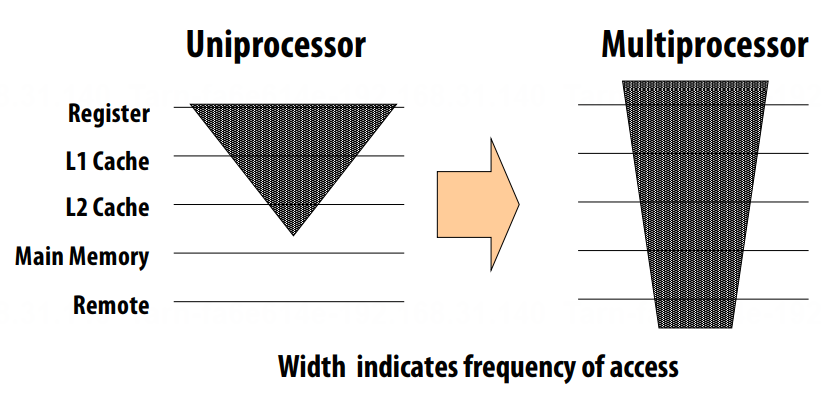
$\text{Average Memory Access Time (AMAT) }= \sum_0^n{\text{frequency of access} \cross \text{latency of access}}$
多处理器的 MAT 会增加。
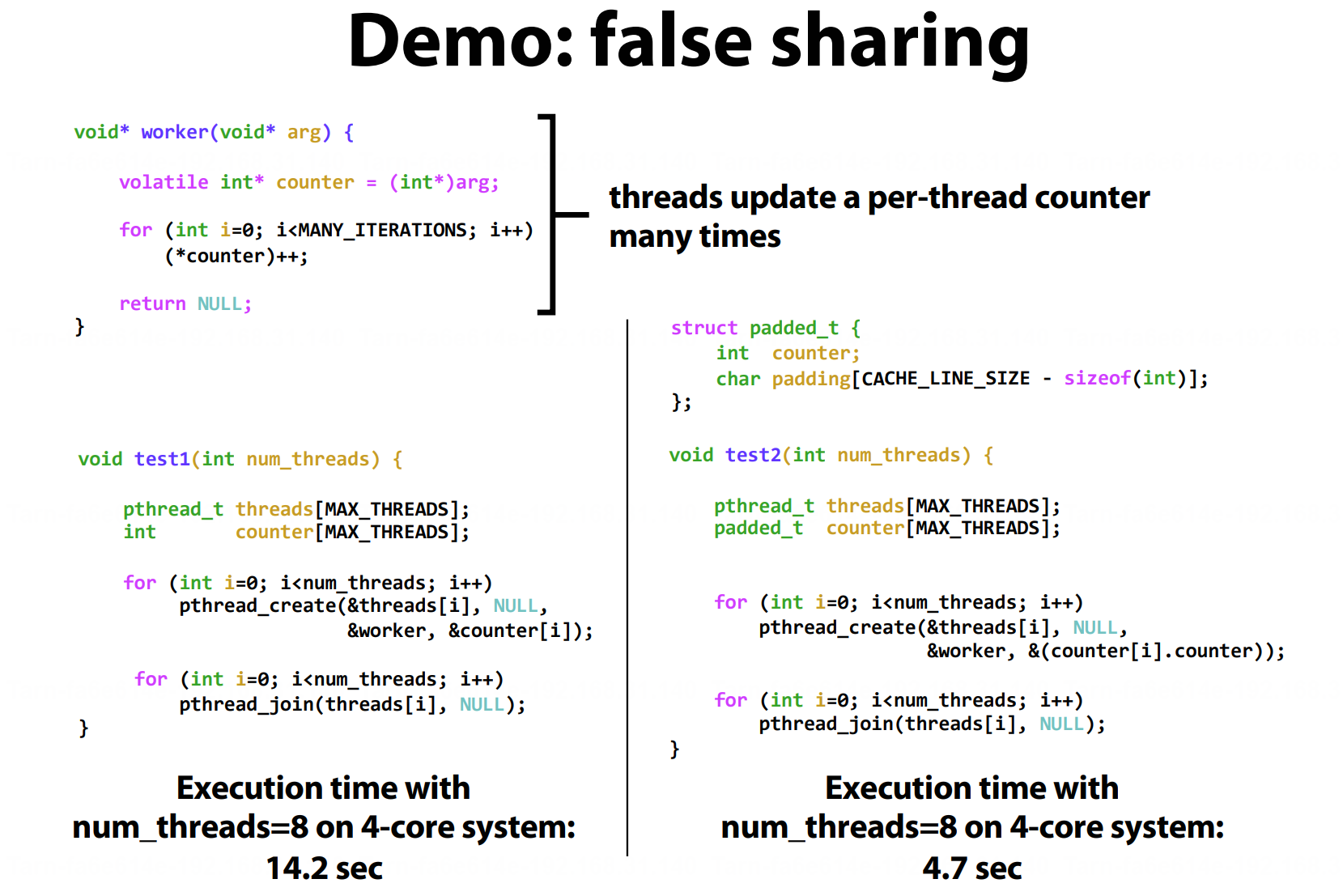
工具:VTune
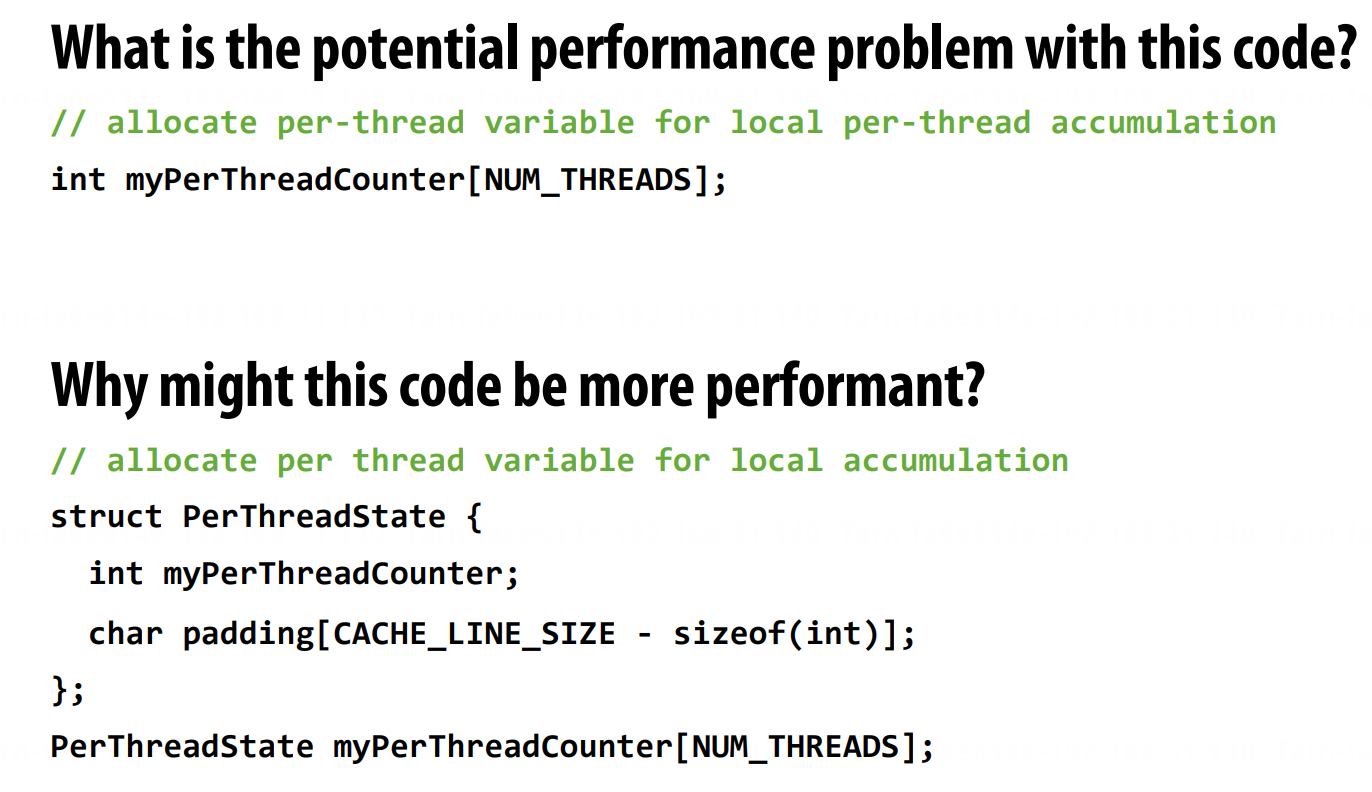
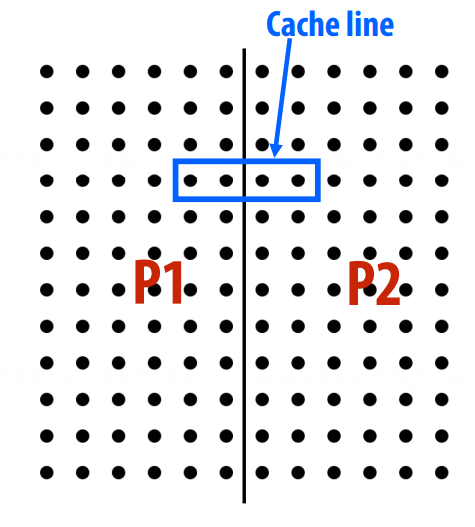
预期外的通信:伪共享 false sharing
cache 是以 cache line 为单位的。
所以,代码一,实际不同线程之间会反复「竞争」一个线程;
代码二,对 cache line 进行补全,不会「竞争」。
缓存一致性的问题出现的原因是,单位共享地址的抽象与单个存储单位的实现不一致。
基于侦听 snooping-based 的缓存一致性方法,每当有可能影响 cache coherence 的操作,就会广播。
HW,减少 coherence 的开销;SW,警惕人工引入的由一致性协议 coherence protocol 引起的通信。
规模化 scalable 的 cache conherence,使用基于目录 cache coherence 的方法。
Cache Coherence
Memory Consistency
缓存一致性和内存连贯性。
cache coherence 是多副本的一致性;memory consistency 是多个内存操作执行顺序的连贯性(一致性)。
synchronization library / kernel / lock-free ds
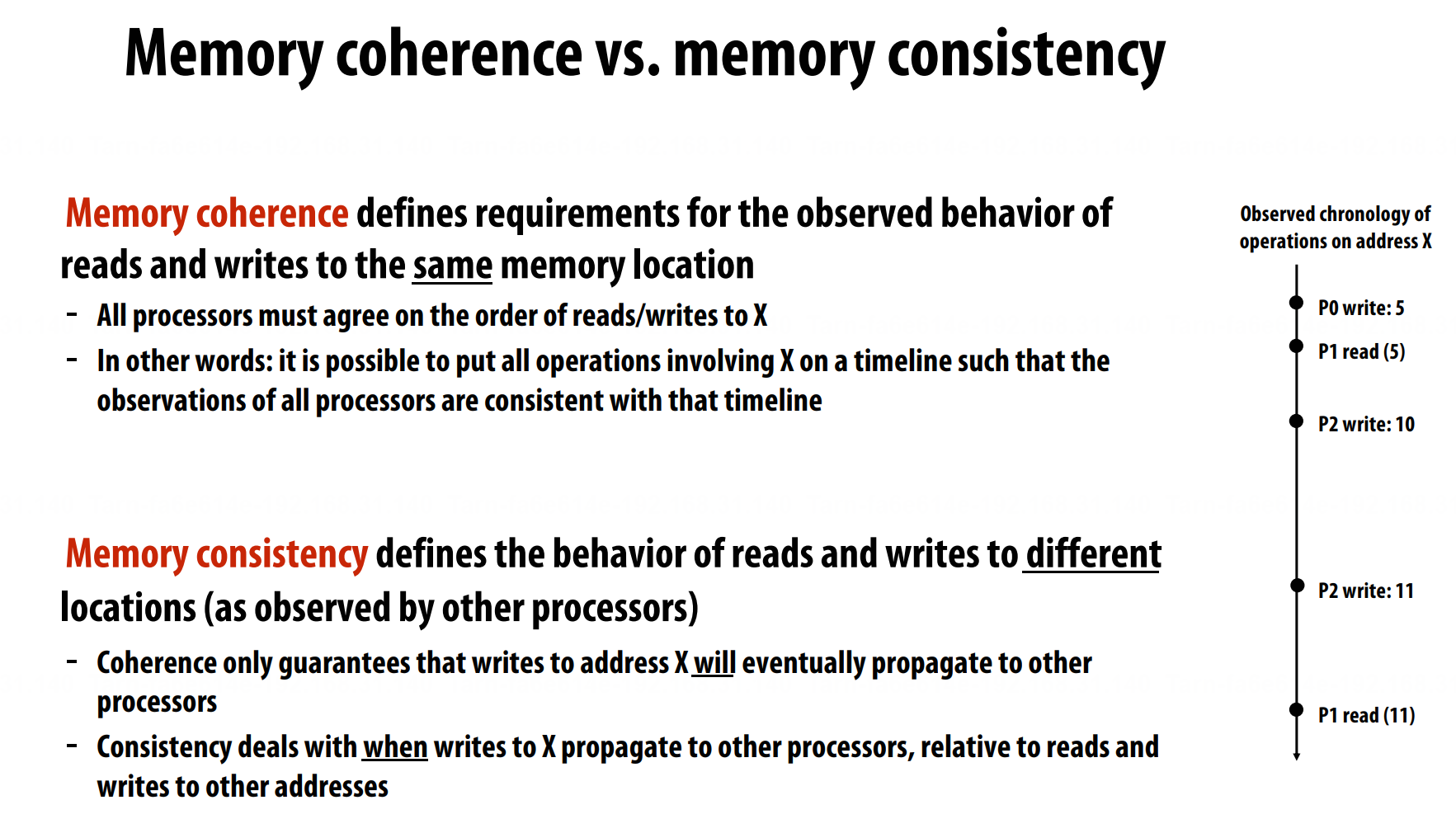
Memory coherence defines requirements for the observed behavior of reads and writes to the same memory location.
Memory consistency defines the behavior of reads and writes to different locations (as observed by other processors).
Sequential Consistency
顺序保障,但是为了提高性能,选择重排。
write buffer,放松了 W-R 先写后读。
TSO (Total Store Order)
PSO (Partial Store Ordering),加锁类似。
these are all valid optimizations if a program consists of a single instruction stream
Weak ordering (WO)
Release Consistency (RC)
同步 synchronization 来挽救。
Fence (memory barrier), read-modify-write/compare-and-swap, transactional memory, …
Intel x86/x64 ~ total store ordering
提供特定的指令去说明,指令不需要保证顺序。
mm_lfence (“load fence”: wait for all loads to complete)
mm_sfence (“store fence”: wait for all stores to complete)
mm_mfence (“mem fence”: wait for all me operations to complete)
ARM processors: very relaxed consistency model
data race free (DRF)
Lock Implementations, Fine-Grained Synchronization and Lock-Free Programming
死锁 Deadlock,正确性,有未完成的任务需要完成, 但是没有操作可以进行。
活锁 Livelock,正确性,一直在做无意义的操作, abort and retry。
饥饿 Starvation,公平性,一个任务处理,其他任务没有操作。
| |
线程越多,lock 的 contention 越激烈,时间越长。
Test-and-test-and-set,在 lock free 之前,while 等待;公平性没有保证。
less traffic <=> more scalable
ticket lock,等待 lock free,取票,等 unlock 叫号。
compare and swap
fetch-and-op
Lock-free queue (bound / unbound)
Lock-free stack
CAS (compare_and_swap)
double compare and swap
“读取-尝试-重试”的循环是无锁编程的标志性模式。
while + CAS
无锁是用如原子操作的底层方式来保证线程安全。
Relaxed Consistency + Domain-Specific Programming Systems
relaxed memory consistency
见 Cache Coherence。
DSL (Domain-Specific programming languages)
Halide, for image processing.
不是为新手准备的,提供了一系列的用于优化的原语。
系统搭建的关键,为作业选择合适的再现方式。
Choosing the “right” representations for the job
自然、可靠、性能;调度(呈现成骨架、草图、pipeline 的感觉)
Lizst, PDE’s on meshes.
编译器决定用什么数据结构。
可迁移,CPU, GPU 采用不同的算法。
把握最重要的元素、简单的系统、原语组合。
Transactional Memory
事务内存,另一种同步抽象,声明式 declarative,如 atomic{}。
命令式 Imperative
atomic { } ≠ lock() + unlock()
数据版本控制策略 data versioning policy
- Eager versioning (undo-log based)
- Lazy versioning (write-buffer based)
Pessimistic Conflict Detection (悲观冲突检测)
“Eager” (主动的)
Optimistic Conflict Detection (乐观冲突检测)
“Lazy” (懒惰的) 或 “Commit” (提交时)
STM (Software Transactional Memory)
Transactions II + Ask Me Anything with Kayvon and Kunle
Hardware transactional memory (HTM)
Data versioning is implemented in caches
Conflict detection through cache coherence protocol